关于智能车模起跑线识别方法的设计与实现
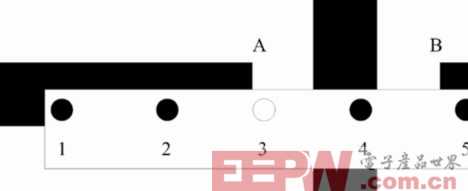
图5 光电传感器阵列与起跑线的相对关系(2)
1) 光电传感器阵列有2个传感器检测到白色跑道而其它传感器检测到黑线时,如图4所示;
2) 光电传感器阵列有1个传感器检测到白色跑道而其它传感器检测到黑线时,如图5所示。
根据以上两种情形,在光电传感器阵列采用等距分布的情况下,可有如(1)式所示的数学描述。
(1)
(2)
(3)
根据(3)式,做如图6所示的数轴标注方法来表示不等式的取值范围。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码






