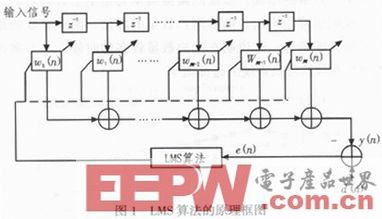
LMS自适应滤波器干扰方法
LMS算法主要存在两个缺点:
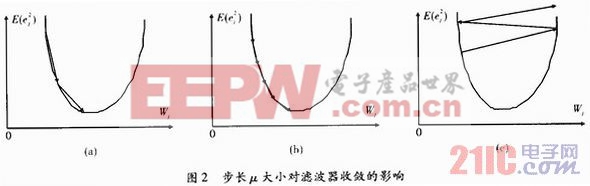
(1)步长μ固定不变,适应能力有限。自适应滤波理论基于外界干扰信号的统计特性在一段长时间内是平稳的前提条件,即只有在外界干扰是平稳过程的时候,自适应滤波器的各个系数经过若干次迭代运算后才最终收敛于维纳解。自适应滤波器的收敛步长一般决定于外界干扰的统计特性,这表示不同的干扰条件下自适应滤波器对于每个干扰波形都需要合适的步长,有些算法的迭代步长是固定的,如LMS算法,步长一般小于自相关矩阵的最大特征值的倒数。而有些则是变化的,如RLS算法。其参数对一段时间长度内的平稳过程具有良好的适应性,对某些统计特性随时间变化的非平稳过程,自适应算法的统计平稳前提并不成立,也就无法收敛于最优的维纳解。对于LMS这类固定步长的算法而言,自适应滤波器的收敛过程大致可分为3种情况,如图2所示。图2(a)所示为理想情况,步长比较合适,若干次收敛后,实现误差最小。图2(b)所示为步长较小的情况,需要经过较长时间的计算后,均方误差才会逐渐逼近最小。耗时长,系统响应迟钝。图2(c)为步长较大的情况,系统无法收敛。图2(b)和图2(c)这两种情况对于自适应滤波而言效果异不理想,但对于干扰方,却是较为理想的干扰效果。
(2)时间上的滞后性,自适应滤波器经过收敛、优化、最终达到最佳的维纳状态这一过程是基于对外界环境的响应不断做出调整,滤波器的反应始终落后于外界环境的变化。这一缺点决定了其对统计特性快速变化的干扰信号适应能力有限。
对于干扰一方而言,可以研究这些缺点,通过相应的干扰信号来破坏自适应滤波器的收敛,这种干扰思路类似于对雷达AGC电路中的通断干扰和角度欺骗的闪烁干扰,将干扰信号设计由两个或多个子干扰信号构成,这些噪声之间交替切换,可实现自适应滤波器收敛过程的不稳定。子干扰信号在时间上排列构成为

其中,J1(t),J2(t),J3(t),…,Jn(t)为子干扰信号,且n≥2。
针对自适应滤波器工作于平稳的干扰条件下这一前提,则可以增大J1(t),J2(t),J3(t),…,Jn(t)各子干扰信号的统计特性。使其对应的合适步长差异较大,LMS滤波器在输入由这些干扰组合成的波形时,造成的结果将是收敛慢或者不收敛,难以取合适的步长完成收敛的功能。
2 软件仿真
使用Matlab软件,构建一个2阶的基于LMS算法的自适应滤波器,有用信号为一正弦波
![]()
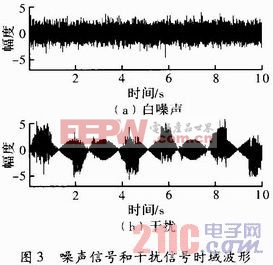
假设无干扰情况下只有噪声信号n(t),n(t)为一均值为0,方差为1的高斯白噪声。假设有干扰情况下,干扰信号J(t)由J1(t)、J2(t)两种子干扰信号构成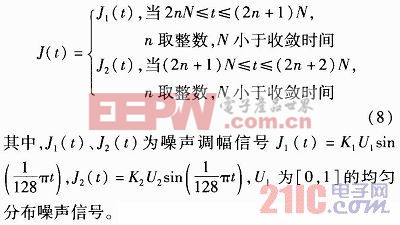
U2是均值为1,方差为1的高斯分布噪声信号。同时为与单一统计特性的高斯白噪声n(t)比较,还需要两子干扰分别乘以常数K1、K2,以满足干扰信号J(t)功率大致等于噪声n(t)。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码