基于加速度模糊控制下的异步电动机双馈系统分析
仿真所使用的主要参数为:额定电压:UN=220V,额定频率:fN=50Hz,额定转速nN=1440r/min,该系统改善前后相对速度及转矩脉动比较示意图如下所示:
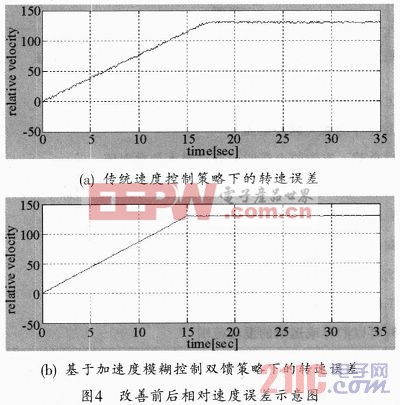
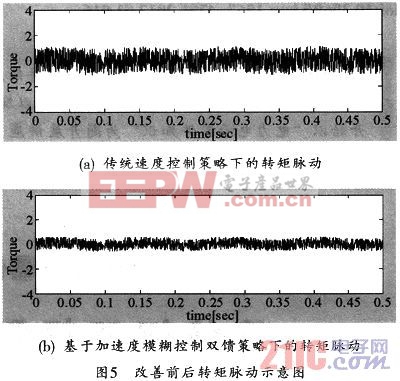
仿真结果对比表明:通过使用基于加速度模糊控制的双馈策略,转矩脉动得到了有效改善,相对转速误差所反映的电机平稳性也得到极大改善,在电压、力矩微调阶段,能实现其快速的渐变过程,最大限度的减小了调整过程中的电动机抖动过程,使相火参数可以很好收敛到要求的输入输出关系,成为对于电机调节过程的又一种新控制策略。
深入分析可以看到:单纯通过以速度为核心的反馈单元,由于信号离散性存在信号丢失,对检测带来了较大误差。以加速度模糊控制为核心的双馈单元,过程中南于离散造成的信号丢失得到了有效控制,相对于前者的误差量值有明显改善效果。另外,如仅以速度反馈影响加减速变化,加速度动态变化过程单一、静态,同时受到牵引与最大电流限制,加速度使用范围较窄,速度斜率被限制在一定范罔内。而以加速度取代速度为动态过程调控策略,整个过程动态、精确,能有效降低起动时牵引与最大电流限制的影响,加速度使用范围扩大,控制时间减少,过程体现了力的平滑过渡,小会出现传统控制下加减速度时的大冲击与振动。
4 结束语
本文提出了一种基于加速度模糊控制下的双馈调控策略,详细分析了其工作原理与运行过程,并通过引入TWS320F240DSP进行仿真对其结果加以验证。结果表明,采用基于加速度模糊控制下的双馈调控策略,可使异步电动机在全过程运行中稳定性得以提升,输出电流谐波得到抑制,有效改善了波形平滑性,并呈现更优秀的运行特性,且调控过程简单易得,能够很好满足对于调控方法的新要求。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码


