基于加速度模糊控制下的异步电动机双馈系统分析
加速度模糊控制模块(如图2)作为整个调控系统的核心,对最终测量及调控结果起举足轻重的效果。模糊控制网络能对结构进行主动控制,采用在线实时调控策略,通过将加速度差△a和加速度差变化量d△a/dt作为输入量模糊控制策略跟踪目标加速度的方法,实现异步电动机在整个过程中的实时反馈跟踪与调整,由于不需要引入被控结构的精确模型和参数,对于利用这种模型扩展到多维加速度下高精度、实时控制系统分析也提供了一种途径。本文中,为提高调控质量,同时出于对运算简单化的考虑,采用二维模糊控制器模糊规则“Aiand Bi=> Ci”并使用三角函数为隶属函数。表1为加速度差的控制策略,其巾E和EC的变化用式(4)计算,图3为加速度差及加速度差变化率沦域示意图,其与控制策略表正相关。

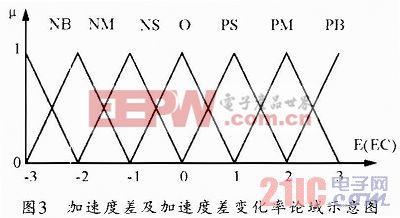
E=an+1-an
EC=En+1-En (4)
另外,模糊控制结束后采用重心法进行解模糊计算:

3 系统实现及仿真说明
本文中系统验证采用以传动系统中应用较多的TMS320F240为核心控制芯片组成电路,TMS320F240集DSP的信号高处理能力及适用于电机控制的优化外围电路于一体,能有效作为软硬件支撑,实现异步电动机的数字化控制。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码


