LEON3开源软核处理器动态图像边缘检测SoC设计
3动态图像边缘检测SoC的实现
本设计提出了一种集图像采集、存储、处理和显示于一个IP核的设计方法,也是动态图像边缘检测SoC设计的核心部分。
3.1局部熵算法的硬件实现
局部熵边缘检测算法的基本思想是:选择待处理像素点的8邻域,即以待处理像素点为中心的3×3窗口;再由局部熵的定义式(公式1)计算出图像3×3窗口的局部熵;

然后通过与给定的阈值进行比较,得到二值化图像,即可得出图像的边缘。硬件实现的处理过程为流水线方式,处理的对象为3×3大小的图像窗口。具体步骤如下:
①3×3窗口的产生。3×3窗口主要通过片上缓存和延时单元实现。图2是以经过3个时钟为例说明了同步产生3×3窗口中一行数据的过程。
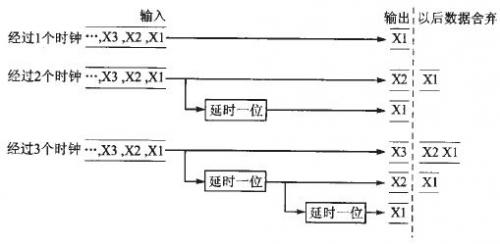
图2同步数据的产生
②熵值的计算。将步骤1中得到的3×3窗口的9个并行数据途经两路进行处理。对于3×3窗口,式(1)化简为式(2):

3×3窗口的9路并行数据,一边送去做并行相加求和,再求平方,作为除法运算的分母;同时把9个数据分别求平方,再求合,作为除法运算的分子。在做除法运算前,为确保其计算精度,要先将分子与分母转换成IEEE-745浮点数后再进行浮点除法运算。最后还要把除法运算的结算转换成整数,考虑到除法运算的结果可能小于1,于是在转换整数前放大1000倍,即保留3位有小数有效位,最后将转换后的整数输出,至此实现了局部熵值的计算过程。局部熵值计算的硬件处理流程如图3所示:
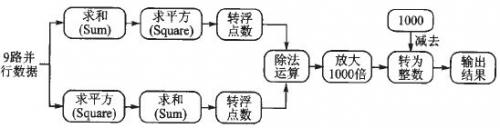
图3局部熵值计算流程示意图
③阈值比较及二值化处理。②中已经得到了放大1000倍后的熵值,在这里只需通过一个比较电路,当熵值大于阈值时,输出0;当熵值小于阈值时,输出1.这样就得到一幅二值化后的边缘图像。至此,完成了整个局部熵边缘检测算法的硬件实现。
3.2自定义IP接口设计
自定义IP核包含以下几个主要部分:图像采集(D5M摄像头接口);图像制式转换;图像存储;图像显示(LTM显示接口);图像边缘检测模块;自定义寄存器。
图4给出了基于APB外围低速总线所设计的图像边缘检测IP核的外部接口信号图。由图中可知,此IP核的接口信号可分为:
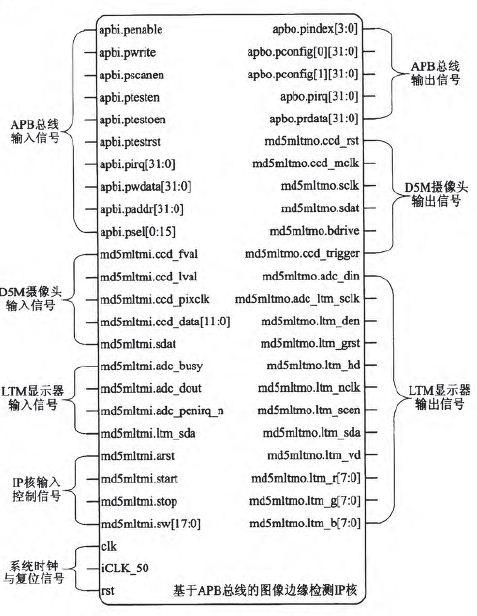
图4用户定义图像边缘检测IP核接口

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码