无线传感器网络差分修正定位算法的改进
1.3 差分修正定位算法
传统差分修正算法如图1所示,信标节点为A(x1,y1),B(x2,y2),C(x3,y3),未知节点M(x,y)。D(x4,y4)是与未知节点M最近的信标节点,令其为差分参考节点。差分参考节点D到信标节点A,B,C的实际距离分别为dDA,dDB,dDC;未知节点M到信标节点A,B,C的测量距离分别为dA,dB,dC。通过信标节点对差分参考节点的定位实现对未知节点坐标的校正。
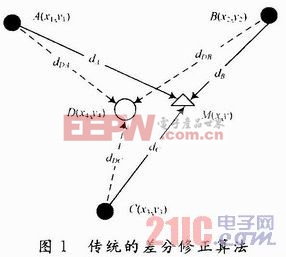
首先通过A,B,C用三边测量法求出D点的测量坐标![]() ,与D点的实际坐标相比较,得出偏移量(△x,△y)。用同样的办法通过A,B,C对M点进行定位,得出M点的测量坐标
,与D点的实际坐标相比较,得出偏移量(△x,△y)。用同样的办法通过A,B,C对M点进行定位,得出M点的测量坐标![]() 。在这里,可以将差分参考点D的偏移量近似作为未知节点M的偏移量。M点的测量坐标加上差分参考点D的偏移量,得出M的定位坐标(x,y)。如式(7)所示:
。在这里,可以将差分参考点D的偏移量近似作为未知节点M的偏移量。M点的测量坐标加上差分参考点D的偏移量,得出M的定位坐标(x,y)。如式(7)所示:

2 改进的差分修正算法与实现
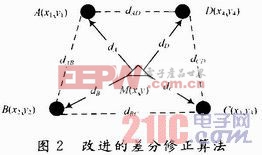
传统的差分修正算法中,差分修正参考点的选取存在一些不合理的因素。该算法要取得较好的定位效果必须有一个信标节点在未知节点附近。在实际应用场合,这一条件通常难以满足:在信标节点密度有限的情况下,未知节点处于信标节点附近不是一个大概率事件。如图2所示,未知节点距离各个信标节点的距离都不是很接近,在定位区域内无法选出最优参考点,那么此时采用最近的参考点对未知节点校正,就会产生很大的误差。
本文提出改进的差分修正算法,利用各信标节点分别作为参考点进行差分修正,从一定程度上可以避免此类问题的出现。
2.1 改进的差分修正定位算法模型
首先,根据接收到的RSSI的大小,确定距离未知节点M最近的三个信标节点。以这三个信标节点确定一个三角形,求出这个三角形的质心。距离该质心最近的信标节点作为定位计算的第四个信标节点,此四点所围成的区域,便是未知节点所在的最小区域。
然后,以A,B,C,D为信标节点对未知节点M进行定位。首先以A点作为差分修正参考点,B,C,D作为信标节点,利用式(7)得出M以A为差分修正点的定位坐标(xma,yma)。然后分别以B,C,D作为差分修正参考点对M(X,Y)进行定位,得到差分修正坐标(xmb,ymb),(xmc,ymc),(xmd,ymd)。
在传统的差分修正算法中,没有充分利用其他信标节点对节点位置影响力的大小,影响了定位精度。改进的差分修正算法,通过加权因子来体现信标节点对节点位置坐标决定权的大小。根据差分参考点到未知节点的距离对差分修正坐标进行加权修正,计算出M的坐标。
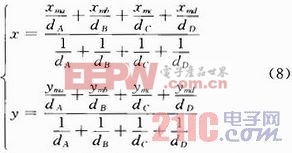
式中:dA,dB,dC,dD为信标节点到未知节点的距离。因子![]() 体现了距离未知节点越近的信标节点作为参考点时,对未知节点坐标位置的影响力越大。通过这种内在关系的反映来达到提高定位精度的目的。
体现了距离未知节点越近的信标节点作为参考点时,对未知节点坐标位置的影响力越大。通过这种内在关系的反映来达到提高定位精度的目的。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码