智能小车自动纠偏与避撞的实现
3.3 超车纠偏算法
到达图1中超车区后,先经超车标志区多条线采用类似弯道纠偏方法调整好小车姿态。然后,根据超声测距的结果判断本车是前车还是后车。若是后车,转弯进入超车道,加速超车后返回行车道,发送无线信号告知另一车超车已完成,最终恢复自主模式行驶。若是前车,则减速慢行,等待后车的超车结束信号,最终恢复跟随模式行驶。超车时后车进入超车区行驶,前车则在原跑道行驶,只要保证两车速度差足够大,就可以保证后车顺利超过前车。
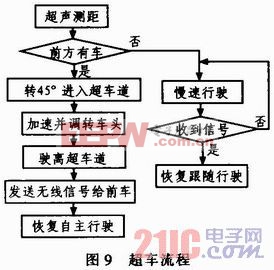
具体流程图如图9所示,其中关键是两车配合的时间问题,通过无线模块可以使两车进行同步。小车在直道、转弯、超车过程中,自动纠偏将一直运行,并实现自主模式和跟随模式自动切换。
3.4 避撞算法
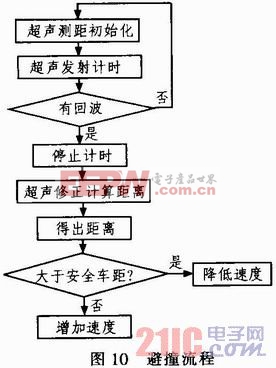
在直线行驶中,为了防止后车撞上前车,需要使用避撞检测模块来保持车距。本文采用HY-SRF05超声测距传感器测量两车间距离,并预设安全值25 cm。车距大于安全值时,后车可加速行驶;车距小于安全值时,则减速。如此,可使得后车跟随前车,实现跟随行驶,但在转弯及超车时,全部自主行驶,不再跟随前车,当转弯,超车等特例操作结束后,再恢复自主行驶/跟随行驶。避撞算法流程图如图10所示。
4 结束语
文中针对具有引导线环境下的路径跟踪这一热点问题,采用多传感器,通过单片机控制,实现智能小车的路径跟踪和自动纠偏的功能,在此基础上还实现了车辆的超车功能。在实际测试中,运行一圈大约需要14.85±1.52 s,小车运行稳定,在测试的25圈中未出现掉落的情况。表明效果较好,并易于实现。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码



