智能小车自动纠偏与避撞的实现
2.1 避撞检测模块
为保证两车不相撞,需要使两车之间距离保持在一个合适的范围,即避撞。系统使用HY-SRF05超声测距传感器,将其安装在小车车头,可实时测得两车纵向距离,从而控制两车加速减速来使距离保持适中。HY-SRF05有优秀的性能,感应角度:不大于15度;探测距离:2~450 cm;精度可达0.2 cm。设l为测量距离,t为往返时间差,超声波的传播速度为c,则有t=2l/c,而声波在空气中传输速率为

2.2 转弯线检测模块
采用红外反射收发对管来检测黑色标志线,放置在小车车头,用于检测图1中的转弯标志线和超车标志线,红外发射管发出的红外线照射到平板上,若红外接收管不能接收到反射回的光线则表示光线全被吸收,则检测出黑色标志线,从而输出高电压,若能接收到反射回的光线则表示检测到非黑色标志线,输出低电压。
2.3 直道纠偏检测模块
行车道40 cm,边界由2 cm黑胶带围成,如果不加防护措施小车容易滑落。正常如果不加防护措施,小车容易脱离跑道。由小车侧面两个E18-D80NK红外传感器进行直道中的纠偏,将两个红外避障传感器分别向外倾斜一定角度,安装在小车两侧,如图4所示,调节红外避障传感器的感应距离,使避障距离介于传感器到跑道与传感器到地面之间,当传感器探测到跑道时,输出低电平,表示小车在跑道上,当探测到地面时,输出高电平,说明小车即将脱离跑道,这时及时纠偏,确保小车正常行驶。

2.4 通信接口
超车时,为了确定两车的位置、及时调节两车的速度、减少超车时间,需要使用nRF905在两车间进行无线通信。nRF905是挪威Nordic VLSI公司推出的单片射频收发器,使用SPI接口与微控制器通信。
2.5 电机驱动模块
采用L298N驱动直流电机,利用它内部的桥式电路来驱动电机,这种方法的优点是利用PWM波来控制电机速度,其余端口可以控制电机的正反转。
3 软件设计
小车行驶模式分为:自主模式、跟随模式。自主模式即前面的车依照事先设定的速度行驶,并自动纠偏。跟随模式即后车紧跟在前车后面,保持一定距离,并自动纠偏。自主模式和跟随模式能自动切换。
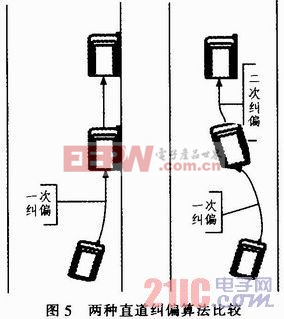
3.1 直道纠偏算法
小车行驶过程中,直道纠偏采用两次纠偏的方式。如果仅采用一次纠偏,如图5左所示,虽然可以把小车的前进方向纠正,但小车整体处在跑道边缘,偏离跑道中心,在下次出现偏离时很容易出现来不及纠正而小车已经掉落跑道的情况。根据否定之否定规律,采用两次纠偏,在纠正行车方向同时,调整小车位置趋向跑道中心。该算法如下:

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码



