基于S3C44B0和μCOS-II的CAN节点的设计
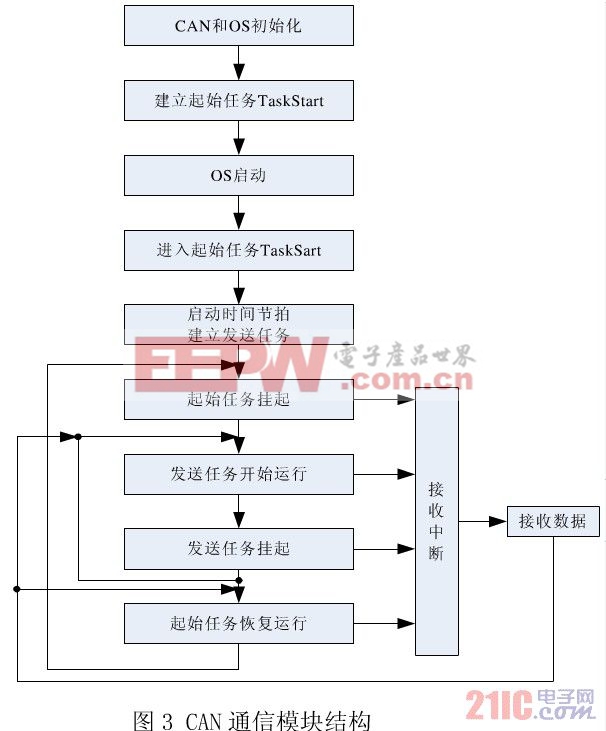
系统建立了两个任务(不包括统计和空闲任务):起始任务Main_Task和发送任务CANSENDDATA_Task,优先级分别为10,12。在CAN控制器初始化和OS初始化后,建立起始任务Main_Task,OS开始运行,进入起始任务Main_Task,起始任务启动时间节拍,并创建发送任务,然后进入挂起。发送任务进入运行态,当发送数据完成后,发送任务挂起。
两个任务在各自的延时结束后按照优先级先后进入运行态,若都在挂起状态则系统的空闲任务进入运行。此过程中如果有接收中断发生,则中断服务将挂起正在运行的任务,并调用CAN数据接收函数,完成数据的接收,当此过程结束后恢复现场,继续进行高优先级的任务。图3是CAN通信模块在μCOS-II中运行的系统结构框图:

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码