基于H∞混合灵敏度的导弹解耦控制器设计方法
3 耦合弹体的数学模型
由上述3个通道的简化模型可知,偏航通道的弹体运动方程中含有滚动通道的参量(δ,γ),滚动通道的弹体运动方程中含有偏航通道的参量(δ,ψ,β)。将相互耦合的俯仰一法向通道(1),偏航通道(2)与滚动通道(3)联立,组成两输入、两输出的多变量系统,取状态向量为[β ψ ψ γ γ]T,控制输入为u=[δψc δγc]T,测量输出为r=[ψc γc]T,得到弹体运动方程的状态空间表示为:
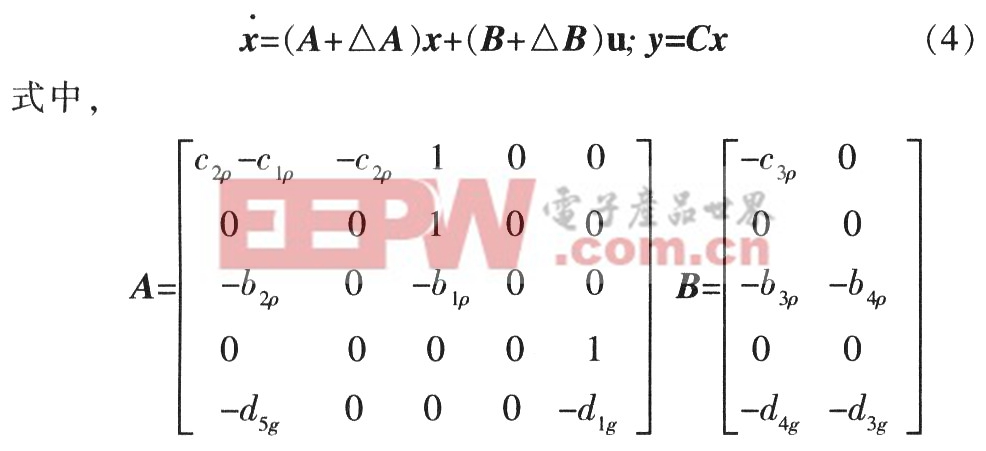

△A,△B为高频弹性振动等引起的参数不确定性部分, 2,3,4)为系数。
2,3,4)为系数。

由式(5)可知,S(s)+T(s)=I,I为单位阵。选择适当的加权函数,对S(s)和T(s)进行频域整形,即在低频段以减小灵敏度函数的增益为主,而在高频段以减小互补灵敏度函数增益为主,使系统频域整形后满足:

式中,Ws(s)为反映系统抗干扰的性能加权,WT(s)为反映系统鲁棒性加权。
4.2 解耦控制器设计问题
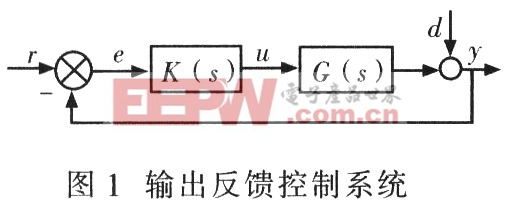
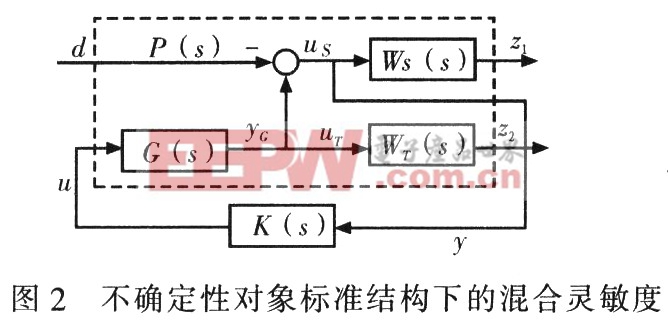
由式(5)可知,T(s)为图1所示系统的闭环传递函数。为此可以将T(s)成形为理想的对角矩阵来达到解耦的目的。文献[4]给出将H∞混合灵敏度成形为标准的H∞问题,本文是在此基础上加以推导,并选择适当加权函数,达到解耦的目的。图2为H∞混合灵敏度框图。图2中,z1,z2为性能评价输出。uS,uT分别为Ws(s)和WT(s)的输入,yG为G(s)的输出。
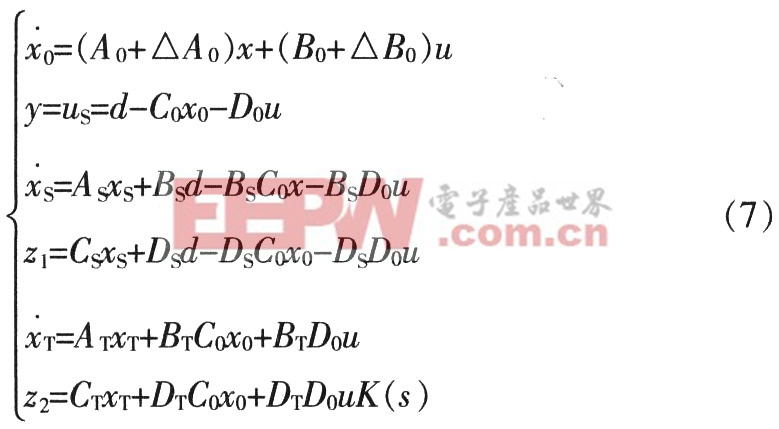
则G0(s),WS(s),WT(s)的状态空间实现分别为:

由图2可知,系统P(s)的输入为d,u,输出为z1,z2,y。设x0,xS,xT为G(s),WT(s),WS(s)的输出状态。由图2可以推导:yG=C0x0+D0uyuT=yg,us=d-yG,则:

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
