基于XC164CM的汽车电动助力转向系统(EPS)(04-100)
上述方程是通过a,b,c坐标系到d,q转子坐标系的变换得到的。这里取转子轴为d轴,q轴顺着旋转方向超前d轴90o电角度。其坐标变换如下:
克拉克(CLARKE)变换
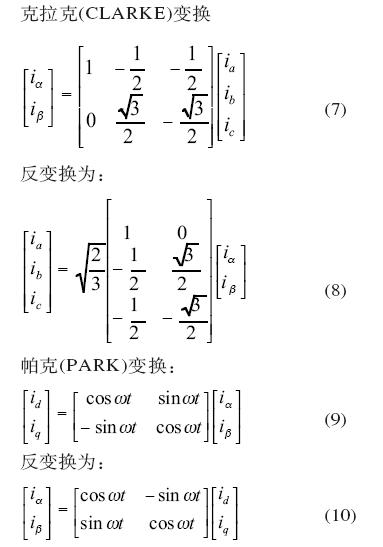
从转子坐标来看,对于定子电流可以分为两部分,即力矩电流iq和励磁电流id。因此,矢量控制中通常使id=0来保证用最小的电流幅值得到最大的输出转矩。此时,式(5)的电机转矩表达式为


加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码