基于MEMS陀螺仪的汽车驾驶操作信号采集系统设计
近年来,微电子机械系统(MEMS)技术微机械惯性器件日渐成熟,惯性测量系统得到了迅猛发展[3]。惯性测量系统将微电子、精密机械、传感器技术相互融合,具有集成度更高、性价比更好、体积更小、功耗更低等特点,且由于微机械结构制作精确、重复性好、易于集成化、适于大批量生产,并有很高的性价比,在汽车上得到了广泛的应用[4-5]。陀螺仪和加速度计是姿态测量系统的重要组成单元,本文选择了ADIS16355传感器,该传感器集成了三轴加速度传感器和三轴陀螺仪传感器,具有体积小、功能强、功耗低等特性,完全满足汽车驾驶运动参数的数据采集要求。
1 测量系统的硬件设计
1.1 测量系统硬件组成
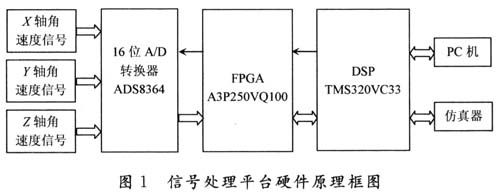
汽车驾驶模拟器姿态测量系统如图1所示,主要包括信号采集模块(陀螺仪及信号调理电路)、信号处理及传输模块(微控制器及通信电路)、电源模块三部分。

信号采集模块由MEMS陀螺仪传感器和信号调理电路组成,完成对油门、脚刹、离合、手刹、档位等车辆驾驶操作机构倾角变化的物理量转换,并完成传感器输出信号的可靠传输;信号处理及传输模块由DSP构成核心器件,实现在姿态和动态加速度变化的条件下,精确测量运动机构的倾角变化,完成信号的数字滤波、角速度变化量积分为角度变化量的运算、差分处理及串行输出等工作;供电电源采用汽车充电发电机和车载蓄电池,供电电压在9 V~30 V之间,系统设备使用的电源电压为5 V。
1.2 MEMS加速度传感器的选择
本文采用微机械(MEMS)ADIS16355陀螺仪进行动态角度测量。ADIS16355陀螺仪是一款多轴运动传感器,它高效地将三轴陀螺与三轴加速度计相结合,以测量所有六自由度。该传感器集成了AD公司微机械和混合信息处理技术,是一个高度集成的解决方案,提供校准后的数字惯性感应;一个SPI接口和简单输出注册结构形成了简单的系统接口和编程;单电源操作在4.75 V~5.25 V;2 000 g冲击承受力。与其他现成惯性传感器相比,ADI-
S16355精度提高了50倍,易于集成(23 mm×23 mm×23 mm Mod封装)。
1.3 差分测量方法
通过将两个姿态传感器探头分别设置在被测物体和该被测物体所处的运动载体上,两姿态传感器在初始状态姿态相同,其安装位置应尽量靠近,使两传感器近似处于一个刚体中。此时不论检测载体(汽车)是否运动,两个姿态传感器探头输出的检测信号大小相等,差模信号接近为零。当检测装置工作时,两个三轴姿态传感器同时提取被测物和载体相对地面的三维运动信号,两组信号通过微处理器的数据融合及处理,屏蔽共有的振动、转动惯量、姿态变化等共模信号,保留被测物体相对运动载体角度或锥角变化的差模信号,进而得到被测物体相对运动载体的姿态变化量。该方法避开了两参照系数据转换的繁琐数学计算,具有电路简单、信号采集处理速度快的特点[6]。如图2(a)所示,为传感器在油门踏板上的差分安装原理图。

2 软件设计
检测系统的软件包括数据采集和数据处理两部分,软件流程图如图3所示。按照安装动态倾角检测装置,通过两个模块同时提取被测物体和动态载体上四组三维检测信号(两组角速度信号和两组加速度信号)。这四组三维电压模拟量的采集信号经过模拟量数据处理模块,屏蔽共有的振动、转动惯量和姿态变化等共模信号,保留被测物体相对运动载体锥角变化的差模信号,该检测信号经DSP的运算处理,完成MEMS陀螺仪传感器输出的检测信号与对应角度量的转换,实现被测物相对载体倾角的测量。

3 实验
按照差分测量的要求,将静止模块粘贴于固定支架上,将运动模块固定于离合器、刹车和油门踏板上(两模块与刚性架构间均用减振胶和海绵做减振材料),安装时使两个模块X轴处于测量灵敏度最高的测量位置,如图2(b)所示为传感器在实车上的安装图。
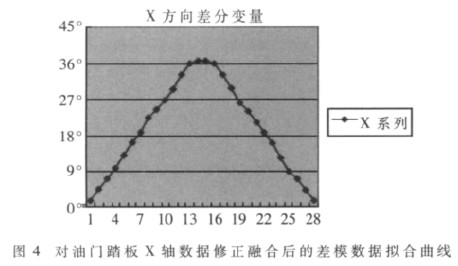
在实车上进行实车实验,刻意让车体产生最大幅度的振动和姿态变化,采集踩下油门踏板(以油门踏板为例)然后放开踏板时的部分测试数据,分别利用加速度信息Xg1~Xg2、角速度信息X?棕1~X?棕2的数据进行综合考虑,相互修正,得到汽车姿态角的最优估计值。如图4为对加速度计和角速度陀螺X轴数据相互修正融合后的差模数据拟合曲线。可以看出,试验结果满足动感汽车驾驶操作倾角信号采集的精度要求,说明此测量系统的可行性。
本文研究设计了基于ADIS16355和DSP的汽车驾驶操作信号采集系统,基本思想是通过采集重力加速度和角速率信号,并对据进行处理,最后运用差分测量方法,实现了对汽车驾驶状态的实时准确测量。实验结果表明该测量系统能满足汽车驾驶操作信号采集的精度要求。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码