焊接项目利用机器人将12个工作小时压缩到45分钟

图 1:全自动机器人焊接工作站,所有操作由 AutomationDirect 生产力 PLC 协调,同步焊接过程、机器人运动和夹具定位。来源:Properly Works
当一家在焊接和钢铁制造方面享有盛誉的公司获得了一份为桥梁建设提供围栏的合同时,时间紧迫。面对在 90 周内制造超过 3 英里围栏的艰巨任务,该公司转向了 Properly Works,一家在自动化和机器人技术优化制造运营方面有着卓越记录的系统集成商,寻求帮助开发一个解决方案,该方案不仅能够缩短整体项目时间,而且能保证高质量的成果。
典型的桥梁围栏段由 16 个钢制栅栏组成,并用超过 140 个 welds 固定。手动完成时,每个段需要大约 10 小时进行设置和焊接。
凭借在工业焊接和钢结构制造项目方面的多年经验,纽约兰开斯特的 Seibel Modern 公司知道,成功的关键在于最大化效率。认识到自动化将给这个繁琐的过程带来优势,工作开始利用协作焊接机器人和开发自动化夹具来提高效率。
最初计划是使用带有焊接器的桌面式机械臂,但很快就确定需要更多的自动化。纽约埃尔马中心的 Properly Works 通过与围栏制造商合作,将以前独立的系统集成到一个完全自动化的机器人工作单元(图 1)中。
差异是不可否认的——时间减少了惊人的12-1,并且额外的好处是减少了50%的修整工作。为了更好地欣赏成功的结果,我们将更仔细地看看使其成为可能的方法。
协作者弥合知识差距
随着时间的流逝,这将是一个协作项目。Properly Works 和 Seibel Modern 合作制定规范,Seibel 定义了焊接几何形状和需求以及夹具,而 Properly Works 应用传感器和自动化以实现最佳操作和安全。
依托其金属加工专业知识,Seibel Modern 创建了由 Properly Works 的伺服电机驱动的 racks-and-pinion 机构供电的焊接夹具,以定位机器人进行焊接。该夹具包括夹紧和水平到垂直定位使用液压提升器。
与机器人焊接臂的桁架定位系统的运动同步是设计中的核心要求。
焊接项目需要协调生产
将每个独立系统组合在一起需要一个周密的集成策略。先进的数字焊接器不仅需要与智能机器人通信,还需要与控制焊接夹具、工作站安全系统和操作员控制系统的系统通信。
设计还需要能够适应不同的围栏段配置。可编程逻辑控制器(PLC)被确定为该应用的理想指挥官,协调每个控制子系统的运动。
作为独立的系统集成商(SI),Properly Works 使用各种品牌的机器人、焊接器、 运动控制系统和一般的工业自动化产品来部署这些系统。
当没有预先定义的工作要求时,Properly Works 通常倾向于选择 AutomationDirect 的产品组合进行自动化和运动控制,因为其产品范围全面、选择、使用和支持都方便,并且价格/性能比 exceptional。
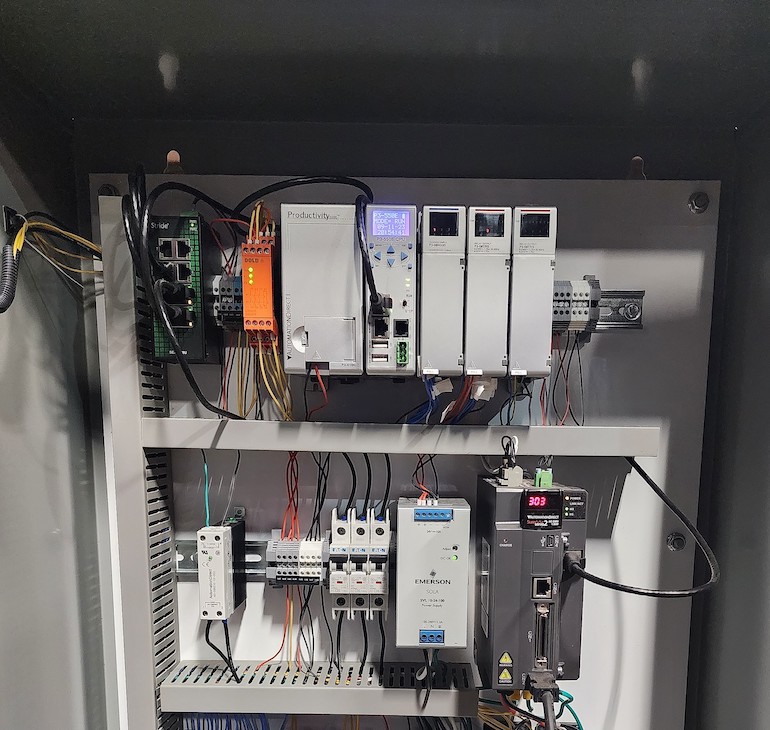
图 2:AutomationDirect Productivity 3000 PLC 提供了编程、内存和通信功能,以协调 SureServo2 驱动器与机器人焊接器和其他自动化设备。来源:Properly Works
为此项目,AutomationDirect 的 Productivity 3000 PLC 被选为机器人工作单元的控制器,因其多功能性和可扩展性(图 2)。众多功能和功能特性,加上大存储能力和 EtherNet/IP 通信,都促成了这一决定。该 PLC 将通过 AutomationDirect SureServo2 系统协调运动。
通过硬接线输入/输出(I/O)信号,以及 IO-Link 连接的离散信号,以及以太网和串行数字通信,PLC 轻松地与所有机器人功能、基于数字的焊接机、安全系统、液压操作的焊接夹具,以及用于定位机器人手臂的运动控制龙门系统进行接口。
SureServo2 驱动小齿轮,移动龙门架,Productivity PLC 具备强大的处理能力和原生的运动控制功能,以精确指挥移动,并与自动化和机器人组件无缝集成和协调。
PLC 还与 AutomationDirect C-more 人机界面 (HMI) 交互,以实现系统的完整可视化。
在任何机器人工作单元中, 安全 至关重要。尽管 Productivity PLC 没有原生的安全功能,但它与专门的安全组件接口,这些组件通过硬接线创建工作单元安全电路。
设计中使用了多种安全产品,包括用于监控安全电路的 Dold 安全继电器 ,用于检测进入受限区域的 Datasensing 安全光栅,以及 蘑菇式按钮 和 拉线式安全开关 紧急停止 (e-stop) 设备。
电缆拉动可以从电缆长度的任何位置触发,在工作单元内部提供一种方便的安全措施,其中急停按钮可能无法触及。
为确保成品质量,机器人及钢制围栏的精确定位对每个围栏段至关重要。在焊接过程中,SureServo2 系统控制一个齿轮齿条线性执行器,使机器人在 9 英尺的线性行程内精确定位。
PLC 管理机器人在线性通道上的位置,以及机器人手臂本身的六个附加运动轴。每个焊接的起止点由 PLC 根据 SureServo2 系统和伺服编码器传感器的反馈来确定。为了防止过度行程,施加了软件限制。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
