为驾驶模式开发AI!TinyML如何改变驾驶条件检测领域的面貌
根据最新研究,驾驶模式可能成为汽车制造商寻求打造终极驾驶体验的新契机。
在一份于2021年发表的论文中,研究人员表明,特定的驾驶模式可能会使电动汽车 (EV) 在高速公路上巡航时的电能消耗增加15%至30%。
根据J.D. Power于2023年进行的一项研究,消费者仍然受到续航焦虑的困扰,在理想情况下,将电池寿命提高约三分之一可能会显著提高客户满意度。驾驶模式还可应对湿滑、结冰或积雪等危险路况,支持更安全的驾驶。问题在于,在不同模式之间切换需要驾驶员手动选择适当的设置。
驾驶模式真的太棒了!为什么它们不能是自动的呢?
本质上,驾驶模式代表着各种动力传动配置,这些配置旨在创造或强调特定的驾驶体验。例如,通过修改转向管柱的响应、悬挂的灵活性或再生制动的激进性,系统将创造截然不同的驾驶体验,从而专注于特定的目标。
传统的Eco模式降低了响应性并改变了变速比以优先考虑节能,而Comfort模式调整了悬挂以更好地吸收颠簸。相反,Sport模式确保强劲的油门响应、更重的方向盘和更硬的悬挂,使驾驶者体验更接近赛车而非巡航。
汽车制造商不会自动从一种模式转换到另一种,因为它们之间的差异非常显著,可能会惊吓到司机。然而,除非在现代高速公路上长时间连续行驶,否则驾驶条件很少是一致的。
往往,用户会遇到需要Eco模式的缓慢交通,然后是在大规模施工下的颠簸区域,适合Comfort模式,之后需要快速加速以脱离停滞,这时短暂启用Sport模式将极大地受益,然后应再切换回Eco模式。这还没有考虑到突然的天气变化。雪地模式会调整传动并降低了油门响应,从而降低动力和扭矩。目标是防止汽车卡住,从而避免驾驶员受到来自自然环境和他们自己的伤害。通过减慢响应并强制平稳加速,大幅减少车轮陷入雪地的风险,即便驾驶员突然踩下油门,也不会轻易失控。
然而,驾驶员应该高度专注于道路本身,不该花精力考虑驾驶模式的切换。面临天气的突然变化,汽车应该帮助用户专注于周围环境,而不是用模式和设置分散他们的注意力。
一个为机器学习和意法半导体量身定制的问题
AI与人
解决这个问题的方案可能在于机器学习。由于拥有众多传感器,车辆能够比任何人更准确地检测道路、天气和其他条件。事实上,车辆在处理湿滑或危险条件时非常精准且敏锐,以至于牵引控制和防抱死制动系统等功能几十年来一直是强制性的。
系统也变得如此智能,牵引力控制可以在正常条件下协助驾驶员避免在转角处欠转向或过度转向。因此,使用机器学习自动检测道路条件并选择最佳模式是多年来塑造汽车创新的自然演变。
然而,构建自动的驾驶模式系统和道路检测机制可能具有挑战性,工程师们常常疑惑从何处入手。以下是启动项目并缩短产品上市时间的三个简单步骤。
第一步 获取AEKD-AICAR1套件
创建一个机器学习应用可能看起来是一项艰巨的任务。当团队考虑收集数据、训练神经网络以及在微控制器上实施算法时,他们甚至在第一个概念验证之前就可能会感到气馁。
小公司甚至可能没有数据科学家以及处理神经网络的专业知识。因此,我们发布了AEKD-AICAR1评估套件,旨在揭开这一过程早期阶段的神秘面纱。
该套装包括AEK-CON-SENSOR1连接开发板和AIS2DW12三轴加速度计。主板本身配备了SPC58EC Chorus微控制器,内置4 MB的Flash存储器,并预装了一个经过训练的神经网络。简而言之,AEKD-AICAR1传感器节点套件包含了开发者开始机器学习所需的一切应用程序。
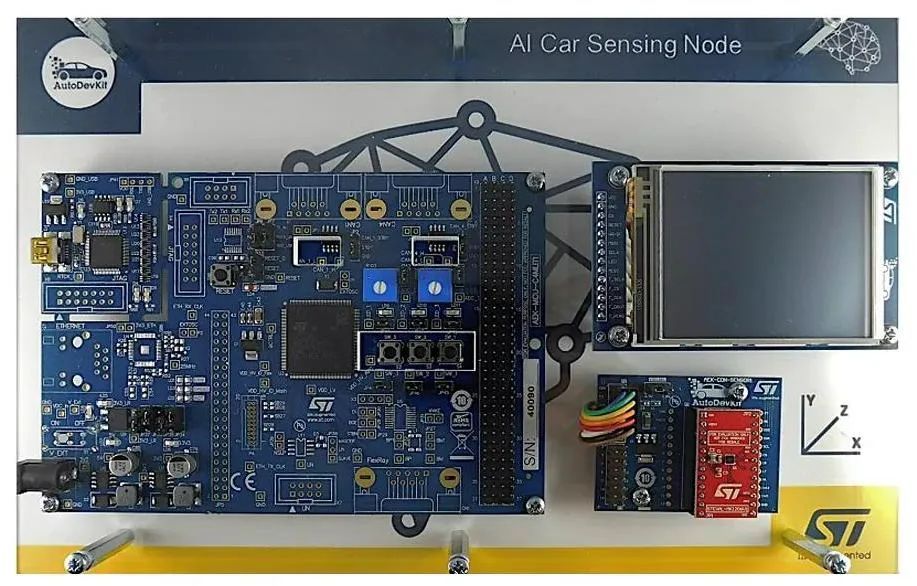
我们甚至提供了一个显示屏,展示代表汽车状态的简单UI,确保团队可以更容易地演示概念验证。系统还有一个设置,可以使用典型的12 V电池或八节AA电池供电,从而提高整体移动性。
第二步 利用意法半导体的软件生态系统
开箱即用,预训练的神经网络能够识别四种状态:正常道路、颠簸道路、打滑和停车。此外,可以将这些状态与其他情况结合起来,如在正常道路上打滑、在颠簸道路上打滑、发动机运转时停车或熄火时停车。
显然,由于该应用仅用于演示目的,我们使用了一小组训练数据。然而,尽管一开始可用的训练数据非常有限,我们仍获得了94%的高成功率,仅在一些额外的条件下存在问题。简而言之,团队已经可以设想,拥有大量更多信息和复杂算法后他们能够取得什么样的成就。
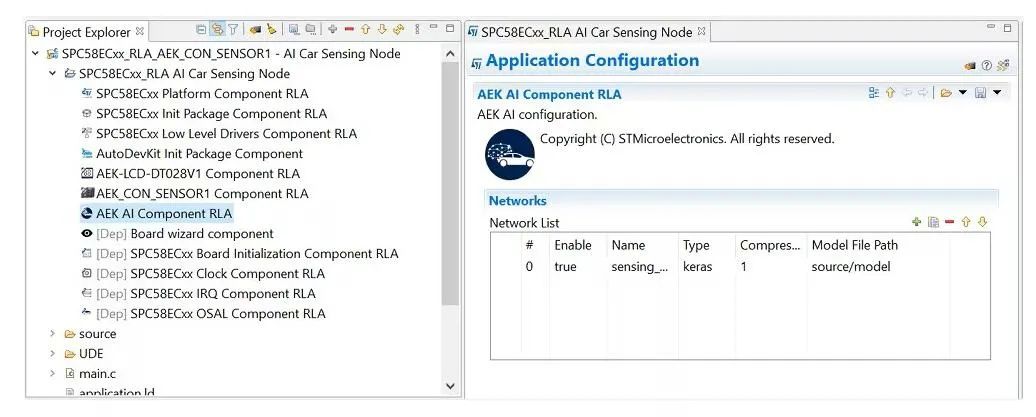
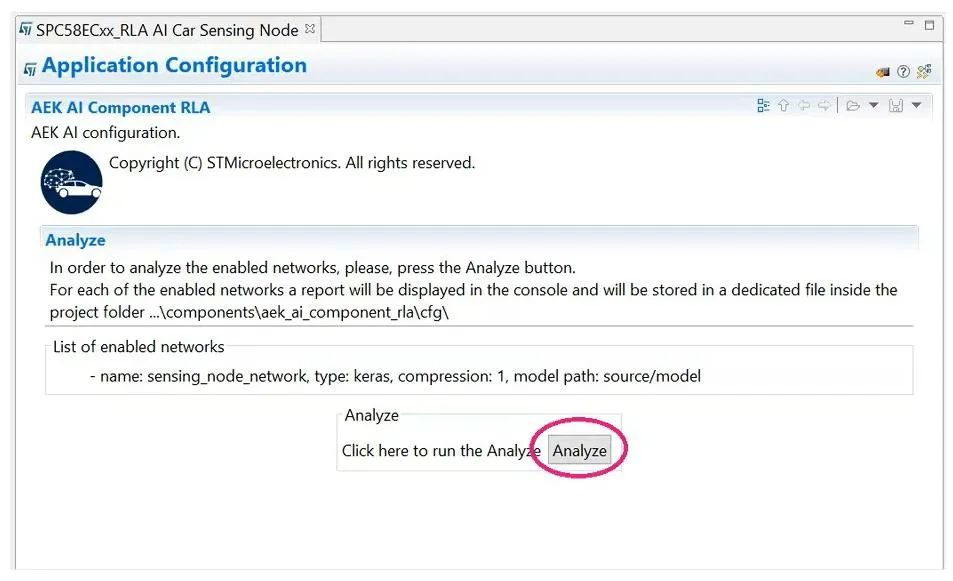
为开始测试模型,开发人员只需获取AutoDevKit Studio和SPC5-STUDIO-AI插件即可,这将使他们能够导入最流行的深度学习框架,如Keras和TensorFlow Lite。意法半导体插件甚至可以验证神经网络,并在微控制器上模拟自身性能,能够帮助开发人员基本了解所需的内存占用和推理时间。
无论团队的专业水平如何,这一步都非常重要,对于经验较少的工程师,所带来的帮助则尤为巨大。在边缘进行机器学习工作时,很容易高估RAM或计算吞吐量的要求。我们的工具可以帮助更快、更准确地了解应用的硬件需求。
第三步 测试您的应用并加以完善
下一步是将AEKD-AICAR1置于在驾驶员一侧的地板上,靠近车辆前部,从而测试算法并捕获更多数据。实际上,这样可以模仿现实世界的性能并收集更多信息。因此,工程师不仅仅是在设计一个更智能的驾驶条件检测,而且同时也是在完善它。
随着团队从加速度计或连接到套件的其他传感器收集更多数据,就有可能更准确地检测到更多道路条件,从而为真正意义上的驾驶模式智能选择奠定基础。我们的用户手册甚至提供了Python脚本和Google Colab的操作指南,因此即使对数据科学没有太多经验的人也可以开始使用。
另请阅读:AEKD-AICAR1-汽车中基于意法半导体开发板的机器学习功能,既不盲目上马,也不轻易落后
争当第一的竞赛
遵循这三个步骤将帮助团队在正确的轨道上启动。开发人员仍然需要优化自身的解决方案,并找到一条能够获得竞争力的市场路径。然而,意法半导体不仅提供支持,还提供了一个完整的合作伙伴计划,拥有专业知识的众多伙伴公司将可为客户带来独特的优势。简而言之,问题不在于机器学习能否帮助实现驾驶模式选择和道路条件检测的自动化,而在于谁将第一个成功实施它。
参考文档
[1] Claire Sugihara, Katrina Sutton, Adam Davis, Vaishnavi Karanam, Gil Tal. 从运动到节能:一项关于驾驶员操作对电动汽车效率影响的案例研究。交通研究F部分:交通心理学和行为。第82卷。2021.第412-428页。 doi.org/10.1016/j.trf.2021.09.007

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
