一款全自动机动车前照灯检测仪的动态特性研究与实现
编者按:全自动机动车前照灯检测仪,是为了适应机动车前照灯在线动态检测需要而研发设计的专用精密仪器。它采用先进的双CCD图像处理技术、伺服电机及驱动控制技术、计算机通信技术、传感器多融合技术,100%国产全志科技T3处理器机电一体化设计,检测仪测量精度高、测量模式多样、标定调试简单方便、智能化程度高、抗干扰能力强。其工作稳定性和可靠性、测量准确性、重复性和零点漂移都符合国家计量检定规程JJG745-2016的相关要求,它为机动车前照灯的检测提供了重要的技术手段。
0 引言
机动车前照灯的安全检测是保障机动车行车安全的一个重要因素。世界各国对机动车前照灯有严格的安全检测要求,在我国随着科技和新能源汽车的加速发展,汽车保有量呈现井喷式增长,交通运输安全变得越来越重要。前照灯主要是用于机动车夜间行驶照明,它的安装角度及发光强度和照射方向等参数对于行车安全是至关重要的。所有前照灯夜间同时照明时,应具有能使驾驶员看清前方150 m 距离以内交通障碍物的性能[1],照明光束应对准车的前进方向,主光轴的方向应该偏下。前照灯的发光强度不足或者照射方向不合适,路前方的状况就不能清晰易见,或者给迎面驶来的汽车里的驾驶员造成眩目,妨碍视野,这些都是导致事故的重要因素。
为了降低行车事故,确保行车安全,机动车在出厂前,其前照灯性能参数必须调整正确;机动车使用过程中,前照灯的安全检验必须经常化和制度化。国家决定实施GB7258—2012《机动车运行安全技术条件》和GB18565-2016《道路运输车辆综合性能要求和检验方法》[2]国家标准,其中规定了前照灯的发光强度、照射位置及检验方法,使我国的车辆检验制度更加严谨、更加规范。因此,有必要对机动车前照灯进行深入研究和检测,而研制出相应的精确测量仪器设备可以为机动车前照灯的研究提供有利依据,必将对我国汽车工业的发展做出应有的贡献。
1 机动车前照灯检测仪检测原理和方法
机动车前照灯检测仪需要测量前照灯远光发光强度、远光光束偏移量、近光明暗截止线交叉点偏移量以及前照灯基准中心高度等各项参数[3]。
本课题研究的机动车前照灯检测采用两种基本方法:追光法和分光法。通过伺服电机及驱动控制技术来进行精确定位,控制检测仪水平行走和光接收箱垂直升降。通过CCD 来追光和测量。
CCD 追光和测量设计有两种:一种是单CCD 设计,另外一种是双CCD 设计。单CCD 设计采用1 个摄像机,通过开关透镜来计算偏移角度,整体设计经济实用,但是检测速度偏慢。双CCD 设计是在单CCD 的基础上进行控制算法优化,其中一个是追光CCD,一个是光斑CCD。
单CCD 设计简单易用,但是在线调灯时,单CCD不能在追光的同时实时计算角度,使得调灯时不能通过测量来实时反映新的角度,只能通过图像相对于屏幕中心的坐标和仪器当前的脉沖坐标来计算新的角度,从而使得调灯时左右方向的偏角误差较大,而双CCD 设计则通过实时采集透过透镜后的图像来计算角度解决这个问题。
双CCD 设计优化光接收箱的光路,使用分光法,让机动车前照灯发射出来的光通过一个安放在光接收箱内与水平方向成45°具有发射和透射功能的磨砂玻璃,让前照灯发出的光一分为二,一部分发射到磨砂玻璃,一部分再通过菲涅尔透镜进行会聚,使用两个CCD 分别采集没有通过菲涅尔透镜的光斑图像(主要用于追光)和通过透镜后会聚了的光斑图像(主要用于测量计算)。单CCD 设计透镜开关1 次需要费时18.5 s,双CCD 设计比单CCD 去掉了透镜的开关动作,从而达到节省时间,提高检测速度的目的[4]。
综上所述,本课题最终采用双CCD 设计,追光法和分光法两者融合的技术,具有全自动追光和全自动测量功能,不仅大幅提升检测速度,而且大大提高检测准确率和成功率。具体设计原理和方法如图1所示。

图1 双CCD光路结构图
2 机动车前照灯检测仪总体设计
仪器的总体设计包括三大部分:立柱、光接收箱、底箱[5]。立柱是检测仪光接收箱垂直运动的支撑导向柱,同时也是检测仪人机交互接口、主机和数据通讯接口,立柱上安装了检测仪移动按键、检测仪的液晶显示屏及触摸屏、光电池。光接收箱是由一套光学测量系统组成,包括光路结构、成像系统、数据采集系统、测量系统四大部分组成,可以对照射进入的光束进行光强和照射角度的测量,内部安装了两个CCD。具体设计如图2所示。

图2 系统总体结构框图
底箱是前照灯检测仪的支撑装置,具体设计如图3所示。主要装有电源系统、伺服系统、霍尔传感器、行程开关、刹车片、离合器等,其中水平与垂直方向的伺服电机及伺服驱动控制系统,以驱动检测仪水平方向与垂直方向的运动。

图3 底箱结构图
3 机动车前照灯检测仪硬件设计
本文硬件采用双核的ARM Cortex A7 搭载Android作为主控系统,包括系统管理层和系统接口层,主要论述人机交互、伺服电机及驱动控制系统和光学检测系统的设计。

图4 系统硬件设计框图
硬件设计了一种基于国产全志科技T3 处理器的多接口检测平台,可实现伺服电机驱动控制、输入控制信号、输出控制信号、图像数据实时采集和传输、霍尔和光电传感器控制、行程开关控制等,具体设计如图4所示。
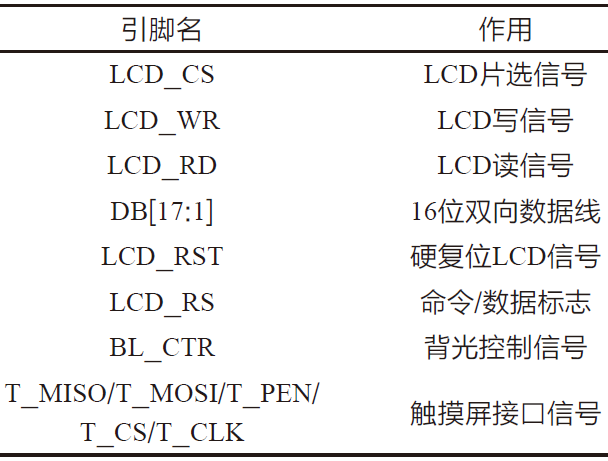
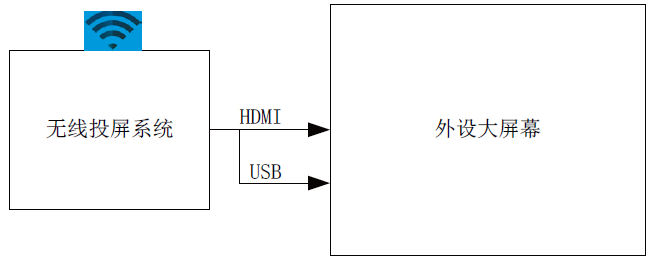
系统管理层即灯光检测系统硬件包括:T3 处理器主板、人机界面、以太网通讯、RS232 串口通讯、USB通讯、Wi-Fi 通信。其中,人机界面完成人机交互,Wi-Fi 通信、以太网、RS232 串口和USB 通讯方便用户连接其他设备进行数据交换和传输实时测量数据。系统接口硬件包括:图像采集接口、输入和输出控制信号接口、伺服电机及驱动控制接口、霍尔和光电传感器接口、行程开关接口等。
4 机动车前照灯检测仪软件设计
本文软件设计采用Android 嵌入式操作系统+ 应用程序架构。软件主要在T3 处理器主板完成,利用ARM实现对测量光信号和高度信号接收、解析、通讯和存储,动态反映光信号和高度信号的特性,并且把测量结果通过Wi-Fi 通信实时传送到相关监测部门。
检测仪不仅采用纯软件的标定流程,只需点击不同的按钮即可完成全部标定;而且采用可视化操作界面,直观明了,升级方便。检测仪软件主要设计为控制模块、测量模块、调灯模块、参数设置模块、通信模块、标定模块、数据库管理模块、打印模块、帮助模块共9 个部分。其中:
1)控制模块负责控制主机的一切动作,响应主机控制面板上的按键,响应用户通过控制软件而控制按钮的输入命令,响应上位机的控制命令;
2)测量模块根据设定的参数进行各种模式的测量;
3)调灯模块进行在线调灯;
4)参数设置模块进行各种参数设置,如检测模式,预置高度,复位方式,追光速度,通信协议,左主远灯合格范围等十一大项,31 个参数的设置;
5)通信模块主要负责主机与主机,主机与外部设备之间的通信;
6)标定模块主要负责对远光和近光偏角,光强,高度的标定工作;
7)数据库管理模块主要负责保存,查询,浏览,删除检测数据;
8)打印模块主要是打印实时检测数据,从数据库查询系统中打印以往数据;
9)帮助模块主要是提供帮助,包括一些即时的提示,和完整的帮助文档。
5 实验分析
本文设计的机动车前照灯检测仪为:佛山翰创检测仪器有限公司MKD-801 型。实验的结果见图5。

1)本实验的目的是检验佛山翰创MKD-801 型机动车前照灯检测仪的设计性能,实验结果表明:无论是前照灯的远光或近光,都能采用类视觉的追光系统进行精准、快速的光轴定位,并且全自动完成对前照灯发光光强及光轴的偏移量的动态跟踪测量,测量误差优于国家标准要求。
2)佛山翰创MKD-801 型检测仪,整体性能均达到预期设计目标,目前产品已经批量销售两千多台,具有一定的社会经济价值。
6 结束语
本文详细阐述了一款全自动、智能型的对机动车前照灯的远、近光进行检测的仪器。对仪器的检测原理和方法、总体设计、软硬件设计做了整体阐述,并简要介绍了实验分析,实现了机动车前照灯的动态检测。检测仪不仅控制方式多样化,人机界面友好;而且配备数据库管理,对外通信,在线调灯等功能,使其不仅适合于机动车安全技术检测站用户,也适用于机动车制造厂、维修厂、灯具厂等众多不同用户对机动车前照灯进行调整、检验,是真正的新一代灯光检测仪。
参考文献:
[1] 夏先扬.新型汽车前照灯检测时的特殊要求[J].汽车维护与修理,2004(10):30-32.
[2] GB18565-2016道路运输车辆综合性能要求和检验方法[S].
[1] 康鸿雁.自动跟踪型汽车前照灯检测仪研究与实现[J].菏泽学院学报,2009(3):75-79.
[3] 刘汉民,王跃明.全新的双CCD测量技术在机动车前照灯远近光检测中的应用[J].中国汽车维修市场,2002,7:44-47.
[4] 吴勇,胡政.浅谈DSP技术在汽车前照灯远近光检测中的应用[J].汽车维护与修理,2006(1):31-32.
(本文来源于必威娱乐平台 杂志2023年1月期)
关键词: 202301 机动车前照灯 追光法 分光法 JJG745-2016 双CCD图像处理技术 伺服电机及驱动控制技术

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码