基于Boa-web服务器的远程机器人控制(网络篇)
本人秉着对智能机器人的热爱在上个学期选修了智能机器人这门课,尽管最后因为没及时把作业交上去就挂了这门选修课,o(︶︿︶)o唉(ps:老师呀,要是你看到我写的这篇文章后,你就发发慈悲就把我的成绩改过来哈)、


记得上这门课的老师先是讲诉了单片机的基本应用和单片机编程,然后课程结束的时候给我们介绍了下tiny6410开发板。后来我去查阅了相关资料,觉得用这这块板做个远程控制的机器人是可行的,因此哥儿最近刚入手了友善之臂的tiny6410开发板(ps:这可花了我600大洋,老师呀怎么你也得把我成绩改及格撒),关于这块开发板的详细信息可以参照附件或者友善之臂的官方网发布的相关文档。
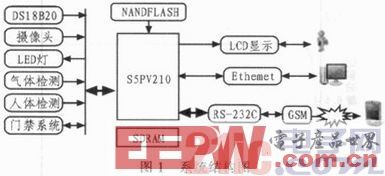
硬件资源
首先,我们先看下tiny6410在接口方面哪些接口:
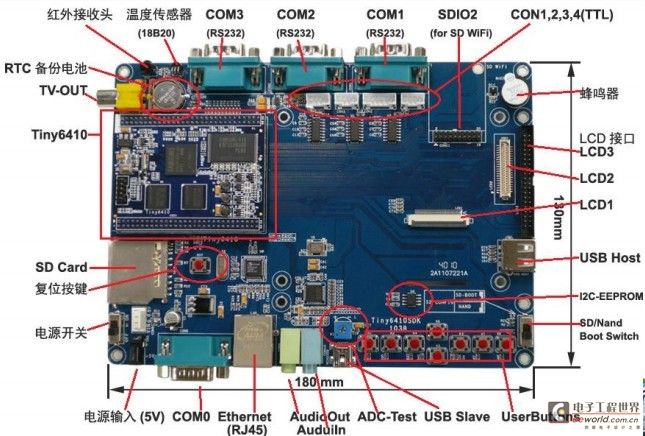
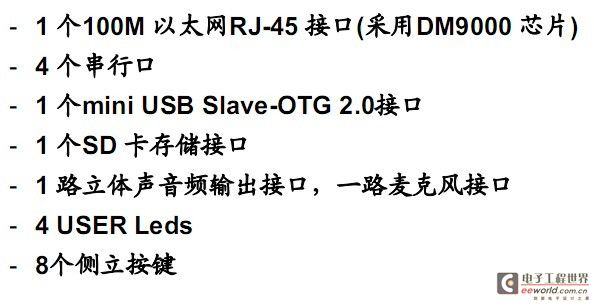

从tiny6410的布局可以看出它所提供的硬件资源是相当多的。
软件资源
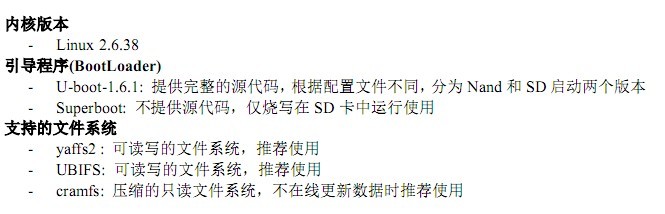
接着,我们来看下tiny6410的软件资源。
Tiny6410可以搭载linux,安卓,winCE系统,下面是linux系统的简单介绍。
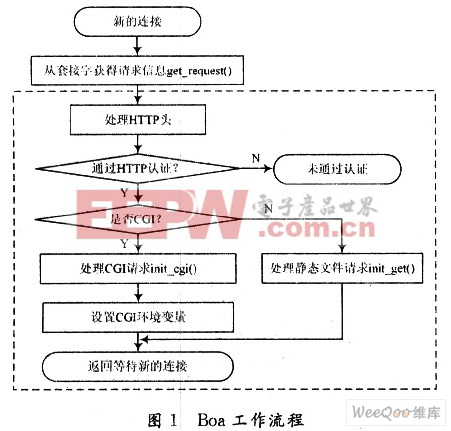
开发之路--网络篇
一、开发思路
如果提起linux,很多人会联想到嵌入式开发和linux下的网络服务器。可是,嵌入式开发对于一般学电子的人来说是有一定的难度的,因此我们可以利用linux下的网络服务器做一些开发。
1
2
关键词: Boa-web服务器远程机器人控
加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码