使用分层的方法设计机器人软件
机器人软件架构是典型的控制回路的层次集, 包含了高端计算平台上的高级任务规划、运动控制回路以及最终的现场可编程门阵列(FPGA)。 在这中间,还有循环控制路径规划、机器人轨迹、障碍避让和许多其他任务。 这些控制回路可在不同的计算节点(包括台式机、实时操作系统以及没有操作系统的自定制处理器)上以不同的速率运行。
在某些时候,系统中的各个部分必须一同运行。 通常情况下,这需要在软件和平台间预定义一个非常简单的界面—就如控制和监测方向与速度般简单。 共享软件栈的不同层次的传感器数据是一个不错的想法,但会给集成带来相当大的麻烦。 每个参与机器人设计的工程师或科学家的理念都有所不同,举例来说,同一个架构对于计算机科学家来说运作良好,而在机械工程师那里可能就无法正常工作。
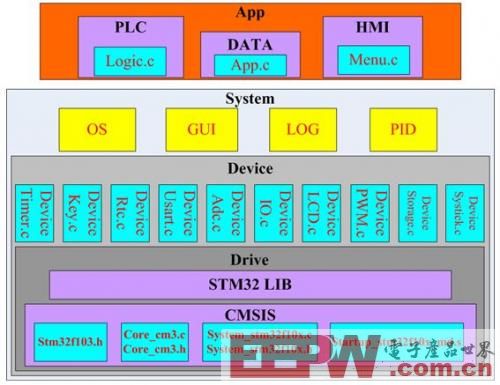
如图1所示,拟议的移动机器人软件架构由下列图形所表示的三至四层系统构成。 软件中的每一层只取决于特定的系统、硬件平台或机器人的终极目标,与其上下层的内容完全不相关。 典型的机器人软件包括驱动程序、平台和算法层组件,而具备用户交互形式的应用包含了用户界面层(该层可能不需要完全自主实现)。
图1. 机器人参考架构
该范例中的架构为带有机械手臂的自主移动机器人,它能够执行路径规划、障碍避让和地图绘制等任务。 这类机器人的应用范围在真实世界十分广泛,包括农业、物流或搜索和救援。 板载传感器包括编码器、惯性测量单元(IMU)、摄像头和多个声纳及红外(IR)传感器。 传感器聚变可以用来整合针对本地化的编码器和IMU数据 ,并定义机器人环境地图。 摄像头则用于识别载板机械手臂握住的物体,而机械手臂的位置由平台层上执行的运动学算法所控制,声纳和红外传感器可以避开障碍物。 最后,转向算法被用来控制机器人的移动,即车轮或履带的移动。 图2就是基于移动机器人架构的美国宇航局机器人。
开发人员可以借助NI LabVIEW 系统设计软件来实现这些移动机器人的平台层。 LabVIEW可用于设计复杂的机器人应用—从机械手臂延伸到自主车辆开发。 该软件提取I/O并可与多种硬件平台集成,帮助工程师和科学家提高了他们的开发效率。 NI CompactRIO 硬件平台在机器人开发中十分常用,它包括了集成的实时处理器与FPGA技术。 LabVIEW平台的内置功能可实现每一层之间的数据通信,通过网络传输数据并显示在PC主机上。
1. 驱动层
顾名思义,驱动层主要处理机器人操控所需的底层驱动函数。 在这一层的组件取决于系统中的传感器和执行器,以及运行着驱动软件的硬件。 一般情况下,这一层的模块采集工程单位(位置,速度,力量等等)中激励器的设定值,生成底层信号来创建相应的触发,其中可能包括关闭这些设定值循环的代码。 同样的,该层的模块还能采集原始传感器数据,将其转换成有用的工程单位,并将传感器值传输至其它架构层。 图3中的驱动层代码就是使用LabVIEW FPGA模块 开发的,并在CompactRIO平台的嵌入式FPGA模块上执行。 声纳、红外和电压传感器都连接在FPGA的数字I/O引脚上,信号在连续循环结构中进行处理,这些结构在FPGA上真正的并行执行。 这些函数输出的数据被发送到平台层上进行进一步处理。

图3. 传感器和激励器的驱动层界面
驱动层可以连接到实际的传感器或激励器,或连接环境仿真器中的I / O。 除了驱动层以外,开发人员无需修改系统中的任何层,就能在仿真和实际硬件之间进行切换 。图4为LabVIEW机器人模块 2011,它包含了基于物理学的环境仿真器,因此用户可在硬件和仿真之间切换,除了硬件I / O模块以外就无需修改任何代码。 开发人员可以使用例如LabVIEW机器人环境仿真器等工具来在软件中快速验证他们的算法。
2. 平台层
平台层中的代码对应了机器人的物理硬件配置。该层中底层的信息和完整的高层软件之间能够进行双向转换,频繁地在驱动层和高层算法层之间切换。如图5所示,我们使用了LabVIEW FPGA读/写结点从FPGA中接受原始红外传感器数据,并且在CompactRIO实时控制器上进行数据处理。 我们使用LabVIEW函数将原始传感器数据转换成有用的数据—在本案例中为距离,并判断我们是否在4米至31米的范围之外。
图5. 平台层在驱动层和算法层之间进行转换
3. 算法层
该层中的组件代表了机器人系统中高层的控制算法。图6呈现了机器人需要完成任务,可以看到算法层中的模块采集系统信息,如位置、速度或处理后的视频图像,并基于所有反馈信息作出控制决定。该层中的组件能够为机器人环境规划地图,并根据机器人周围的障碍物规划路径。图6中的代码显示的是使用矢量场直方图(VFH)避障的范例。在该范例中,距离数据从平台层发送至距离传感器,再由VFH模块接收。VFH模块的输出数据包含了路径方向,该信息直接发送到平台层上。在平台层上,路径方向输入至转向算法,并生成底层代码,然后直接发送到驱动层上的电机上。
图6. 算法层根据反馈信息作出控制决定
算法层组件的另一个范例是搜索红色的球状物体,并使用机械手臂将它拾起的机器人。该机器人凭借其设定的方式,在避让障碍的同时探索环境——这就需要搜索算法与避障算法相结合。在搜索时,平台层模块会处理图像,并且返回物体是否找到的信息。球被检测到以后,算法会生成一条运动轨迹,手臂端点根据它就能抓住并拾起球体。
范例中的每个任务都具有一个高层目标,与平台或物理硬件无关。 如果机器人拥有多个高层目标,那么这一层还需包含仲裁来为目标排序。
4. 用户接口层
用户接口层中的应用程序并不需要完全独立,它为机器人和操作员提供了物理互动,或在PC主机上显示相关信息。 图7显示的是图形用户界面,上面包含板载相机上的实时图像数据,以及地图上周围障碍的XY轴坐标。 伺服角度控制让用户可以旋转与相机连接的板载伺服电机。 在该层中还能读取鼠标或游戏杆的输入数据,或驱动简单的文本显示。 该层中的组件,例如GUI的优先级非常低;而急停按钮等类似组件则需要以确定性的方式与代码捆绑。
根据目标硬件不同,软件层可能分布于多个不同目标。 在很多情况下,各个层都在一个计算平台上运行。 对于不确定的应用程序,软件目标为运行Windows或Linux系统的单台PC。 对于需要更为严格定时限制的系统,软件目标为单个处理节点,且具备实时操作系统。
鉴于 CompactRIO与NI Single-Board RIO 的小体积、供电要求和硬件架构, 它们对于移动应用程序来说是理想的计算平台。驱动程序、平台和算法层可在实时处理器和FPGA上分布,如图8所示,如果需要,用户界面层可在一台主机PC上运行。电机驱动器或传感器过滤器等高速组件可在FPGA架构上确定地运行,无需占用处理器的时钟周期。平台和算法层上的中层控制代码可以以优先循环的方式在实时处理器上确定地运行,而内置的以太网硬件可将信息传输到主机PC上生成用户界面层。
图8. 映射到CompactRIO或NI Single-Board RIO嵌入式系统的移动机器人参考架构
文献中有关移动机器人软件架构的简要介绍表明了该主题还存在很多不同方法来创建机器人软件。 本文就如何构建移动机器人软件给出了一种广义的答案;然而任何设计都需要预先作出考虑与规划,才能适应架构。作为回报,一个定义明确的架构有助于开发人员轻松地并行处理项目,将软件划分成明确的界面层次。 此外,将代码划分成具有明确的输入和输出功能模块有助于今后项目中的代码组件复用。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码