MM74HC4046在感应加热电源中用法的改进
结合国家节能减排政策,感应加热方式具有节能,热污染小,加热速度快等优点,已经逐渐代替传统电阻丝加热方式应用于各种工业透热场合,特别是在注塑机、造粒机、拉丝机等设备上的应用尤为广泛。目前大多数应用于上述设备的感应加热电源普遍存在现场改造麻烦,且经过长时间工作后,因电感量变化大,而引起的加热效率降低,故障率高等问题。为解决上述问题,并满足上述设备的现场改造和工艺要求,对感应加热逆变电源的功率和频率提出了一定的要求。对于上述设备,对电流的透入深度有一定的要求。根据电磁感应定律和趋附效应,感应加热的频率越低,透入深度越深,感应电流越小。综合上述因素,通过理论计算要求感应加热频率为20 kHz 左右。为此,本文介绍了采用IGBT 组成的5 kHz ~28 kHz ,额定电流20 A,额定功率为4 .4 kW 的感应加热逆变电源。此电源对MM74HC4046 集成锁相环的用法进行了改进,实现了数字化控制的它激到自激的转换,使得电源在运行过程中能进行失锁控制,最终保证负载电压与负载电流稳定可靠的无相差频率跟踪,也保证了工件在加热过程中,电源始终处于准谐振状态,使感应加热电源在实际运用中的可靠性与稳定性大大提高。
1 感应加热电源逆变侧主回路
从IGBT 超音频逆变器实现的角度出发,结合并联谐振与串联谐振的优缺点与现场的实际要求,感应加热电源的逆变侧选择串联谐振方案,采用四只40A、600 V 的IGBT 单管VT1 ~VT4组成全桥逆变电路,其电路框图如图1 所示。
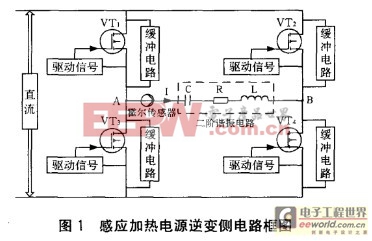
图1 感应加热电源逆变侧电路框图
图1 中的C 选择为高频无感电容,其耐流必须超过电源的最大电流,耐压必须超过AB 两端最大电压与二阶谐振电路的品质因数Q 的乘积;L 选择采用铁氟龙高温绝缘线绕制;R 为逆变侧回路的内阻。为提高逆变器的功率因数,并减轻逆变器件的电磁应力和开关损耗,RLC 电路必须处在串联谐振状态。在同样直流电压输入的情况下,当RLC 电路发生串联谐振时,电流IAB最大,UAB的电压波形为矩形波,IAB的电流波形为正弦波,UAB与IAB为同频同相,若感应加热电源的逆变器频率偏离负载固有谐振频率时,IAB的波形则为畸变的正弦波,偏离的越远畸变得越厉害,且UAB与IAB的相位差越大。
2 锁相环控制电路的改进
2 .1 锁相环控制电路的设计
由于感应加热电源的负载受到实际运用环境、以及被加热工件的形状和温度特性等影响,负载的电感量L、等效内阻R 等参数在电源运行过程中是变化的,所以只有对负载的固有频率进行稳定可靠的跟踪才能保证感应加热电源的效率。为此,在感应加热电源中加入锁相环控制部分。锁相环包含三个必不可少的单元电路,即鉴相器、环路滤波器和压控振荡器。锁相环MM74HC4046 拥有三个鉴相器。鉴相器根据实际电路设计需求,选择鉴相器2 。鉴相器2 是上升沿触发比较,对比较信号的占空比无要求,且鉴相器2 拥有一个三态输出13 脚和相位差输出1 脚。当三态输出口13 脚输出高阻态时,表示锁相环处于稳定的工作状态,3 脚和14 脚的输入无频率与相位差,同时相位差输出1 脚为高电平。
MM74HC4046 锁相环传统的控制方法[4]并没有充分利用上述特点,锁相环的它激起振和它激到自激的转换只能在电路上电的时刻简单地通过电容的充放电实现,且无法对锁相环工作状态进行有效的判断,所以当电源在运行过程中,锁相环如果失锁,电源则无法在运行状态下重新使锁相环进入正常频率跟踪状态。为解决上述问题,本文对传统MM74HC4046 在感应加热中的用法进行了改进,锁相环控制电路原理框图如图2 所示,虚框部分为相对传统控制原理的改进部分。
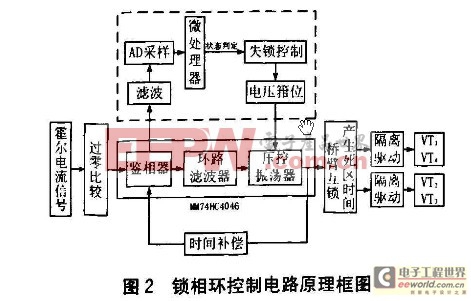
图2 锁相环控制电路原理框图
结合改进的控制原理框图,将传统的它激起振和它激到自激转换方法由纯模拟控制改为数字化控制方法,设计出了图3 所示的MM74HC4046 锁相环的主要外围控制电路,使得可以通过微处理器实时检测和调整锁相环工作状态,提高了电源启动的可靠性与稳定性。
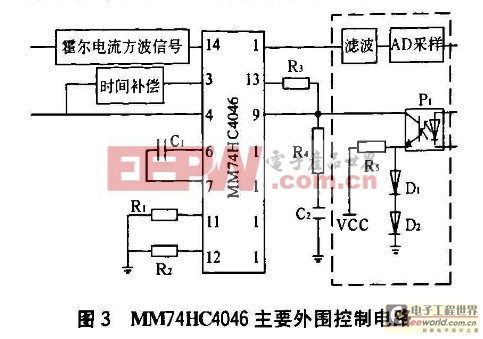
图3 MM74HC4046 主要外围控制电路
首先,根据IGBT 在额定电流所能承受的最高频率,加热工件的频率等实际要求,调整R2和C1的大小确定锁相环输出的最低频率,再确定R1的大小,使锁相环输出的中心频率和最高频率达到要求。其次,根据实验所测,图4 所示的9 脚电压与压控振荡器输出频率的关系,确定9 脚最佳起振电压,使得9 脚电压为起振电压时,压控振荡器输出频率在其中心频率附近,且反馈的霍尔电流信号能够大于一定的电压值,使得电源启动更加容易,因此设计出图3 中虚框内的电路。最后,确定鉴相增益、压控增益和锁定时间,计算出二阶PLL 中环路滤波器的参数R3 、R4和C2 。
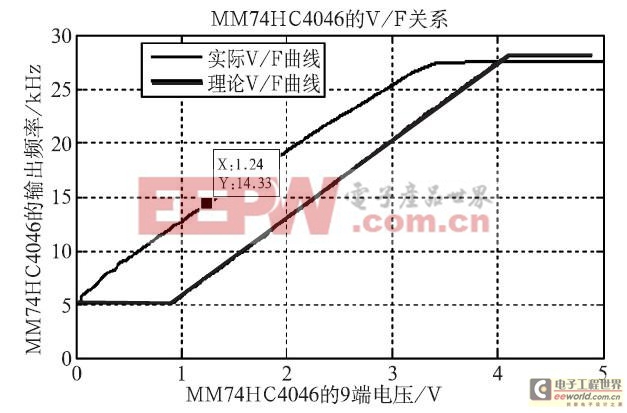
图4 9 脚电压与4 脚输出频率关系曲线
利用图1 中的霍尔传感器检测出负载的电流信号,并定义由A 至B 为正方向,电流信号经过滤波和过零比较处理后,得到与霍尔电流信号同频同相的方波信号,加载到MM74HC4046 的14 脚,4 脚的输出信号经过时间补偿后加载到3 脚,3 脚信号与14 脚信号进行相位比较,产生的相位差与9 脚的平均电压呈线性变化。同时4 脚的输出信号经过桥臂互锁与隔离驱动后分别加载到VT1 ~VT4 ,并保证VT1和VT4的驱动信号的方向与定义的正方向一致。
2.2 它激到自激转换的实现
在MM74HC4046 上电瞬间,无霍尔电流信号,压控振荡器以最低频率输出,若反馈霍尔电流信号大于一定的电压值,锁相环则进入自激状态。但在实际应用中,受到各种环境和条件的影响,锁相环可能在运行过程中出现失锁,此时9 脚的电压为MM74HC4046的供电电压,且压控振荡器输出最高频率;13 脚输出不再是稳定的三态输出;1 脚输出为表示14 脚与3 脚相位差的脉冲信号,该脉冲信号的占空比与绝对相位差呈线性关系。由于传统它激启动和它激到自激的转换方法的不足,使得感应加热电源的稳定性和可靠性不能得到有效的保证。
为弥补传统方法的不足,本文利用MM74HC4046自身的特点,首先,对1 脚的输出信号进行滤波整形后,微处理器对其进行AD采样,当其值低于某一设定的值时,可以断定锁相环处在失锁状态;随后,微处理器对光耦P1进行控制,通过虚框内的两个二极管VD1和VD2管压降的箝位,电阻R5的限流,将其9 脚电压拉至起振电压,使锁相环进入它激状态;最后,将光耦P1的状态恢复,锁相环则进入自激状态,实现电源运行中的锁相环它激到自激的转换,完成失锁控制,保证负载电压与负载电流的无相差跟踪。
3 实验结果
根据实际要求,选用40 A、600 V的IGBT 作为逆变器件。设计锁相环的压控振荡器输出的最低频率为5 kHz ,最高频率为28 kHz 。负载L 为108 μH,C 为0。44 μF ,其谐振频率在20kHz 附近。图5 为锁相环处于无相差跟踪状态的波形,其中信号U1为MM74HC4046 的1 脚输出,可以看出U1基本保持高电平,说明14 脚与3 脚基本无相位差;信号U13为13 脚的电压波形,可以看出其一直保持为3。49 V,说明此脚一直处于高阻态,锁相环处于稳定无相差跟踪状态;信号io表示为霍尔电流信号,可以看出电流波形非常近似为正弦波;信号uo表示加载到VT1和VT4的前端驱动信号,通过与io的相位对比,可以看出此时逆变器工作于准谐振状态,逆变输出频率为21。95 kHz 。图6 为在未加缓冲电路情况下,直流电压Uo 、负载电压iAB和负载电流io的波形,Uo的平均电压为104 V,UAB的最大峰-峰值为380 V,可以看出逆变器件在换流时di/dt 较小,对逆变器件造成的电磁应力与电压冲击也较小。
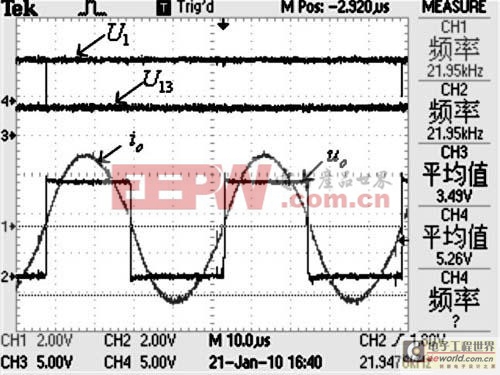
图5 锁相环无相差跟踪状态各信号波形
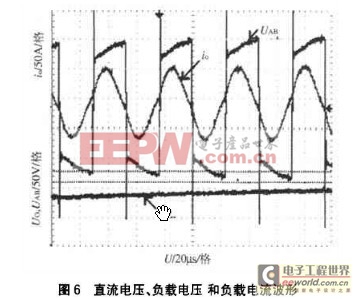
图6 直流电压、负载电压和负载电流波形
4 结 论
实验结果表明,本文对MM74HC4046 集成锁相环的传统用法进行了改进,在保证实现传统逆变器的零电流谐振软开关,减轻逆变器件的电磁应力和开关损耗的前提下,实现了数字化控制的它激
关键词: MM74HC4046 感应加热电源

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码