软件化和网络化的基于Linux的雷达终端系统
现有的雷达终端系统采用了大量的高速专用芯片实现。而芯片的更新换代很快,许多芯片已面临淘汰,即使还没有完全消失,价格也已经很昂贵,给系统的维护和升级换代带来极大不便。随着计算机、软件和网络技术的不断发展,使得新一代的雷达终端系统的软件化和网络化实现成为可能。本文基于此技术背景展开研究,并给出系统的具体实现。
1 整体实现方案
1.1 基于Linux操作系统
传统的雷达显示系统是基于Windows的。但是Windows面临许多问题,譬如封闭源码、易被病毒和黑客入侵等。而Linux是免费的、开源的、网络化的操作系统。其内核是独立和高度可配置的。Linux的网络功能和安全性要优于Windows。所以基于Linux的系统方案是比较合适的。
1.2 系统实现方案
系统由预处理机、主显机和网显机组成,如图1所示。
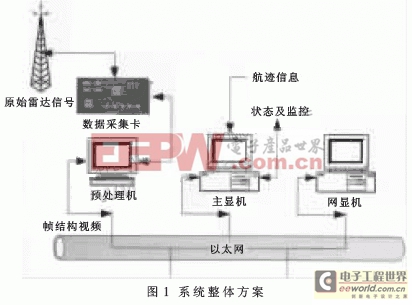
预处理机的主要功能是:雷达视频的采集、压缩和传输,接收二次信息和操控信息并存储所有信息。主显机功能:压缩视频的接收、解压、显示,接收二次信息并显示,人机操控操作,将二次信息和操控信息发送到网络上。网显机类似于主显机,但没有操控功能。为简单起见,本文不讨论网显机的实现。
1 整体实现方案
1.1 基于Linux操作系统
传统的雷达显示系统是基于Windows的。但是Windows面临许多问题,譬如封闭源码、易被病毒和黑客入侵等。而Linux是免费的、开源的、网络化的操作系统。其内核是独立和高度可配置的。Linux的网络功能和安全性要优于Windows。所以基于Linux的系统方案是比较合适的。
1.2 系统实现方案
系统由预处理机、主显机和网显机组成,如图1所示。
预处理机的主要功能是:雷达视频的采集、压缩和传输,接收二次信息和操控信息并存储所有信息。主显机功能:压缩视频的接收、解压、显示,接收二次信息并显示,人机操控操作,将二次信息和操控信息发送到网络上。网显机类似于主显机,但没有操控功能。为简单起见,本文不讨论网显机的实现。
2 预处理机系统的实现
预处理机完成数据的采集、压缩和传输,下面针对这三个方面进行介绍。
2.1 基于PCI总线的雷达视频采集卡
这是系统中惟一的硬件实现部分,也是必不可少的,它将采集的数据传给计算机。这部分的具体实现可参考文献[1]。
2.2 小波压缩技术
当雷达采样率很高时,网络传输前不进行压缩处理,带宽是不够的。
基于帧的压缩技术,不适合对雷达视频具有实时要求的场合,因为会引入一个固定延时。而一维小波压缩可以做到高效压缩和实时要求的折衷。
小波压缩的思想是将一维数字序列分为粗糙尺度和细节两部分,各占一半存储空间,这个过程可以一直递归下去;因为回波信号比较平滑,细节部分主要是噪声,所以只保留粗糙尺度部分,如图2所示。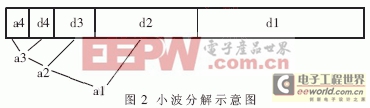
不同尺度系数的分解与合成如图3所示。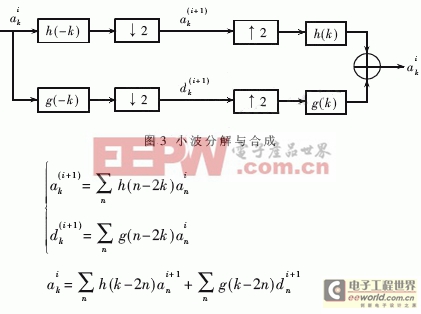
其中h(k)、g(k)是一组由两尺度方程推导出的共轭镜像滤波器。aki是第i层的(粗)尺度系数。第i层按递归分解成i+1层的更大尺度部分ak(i+1)和细节部分dk(i+1)。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码