室内安防巡逻与灭火多功能机器人控制系统的设计与实现*
编者按:针对室内大型场所的三防自动化困难问题,设计了一款室内安防巡逻与灭火多功能机器人,具有电子地图构建、定位、导航、事故处理与远程监控等功能。给出了该机器人总体组成与控制系统软硬件架构,并对机器人核心的电子地图自主构建功能做了实验测试。试验结果表明,该机器人可以自主构建出现实环境的电子地图,保证定位与导航功能的实现基础。
*基金项目:国家级大学生创新创业训练计划项目(201910222018)。
作者简介:张宪锋(1999—),男,黑龙江哈尔滨人,2017级本科生,E-mail:zxf183813@163.com。
通讯作者简介:郭士清(1973—),男,博士,副教授,主要研究方向为地下作业技术与装备、机电一体化,E-mail: 61233774@qq.com。
0 引言
目前仓储中心、超级商场等大型场所的三防依赖监控系统,因监控系统存在盲区,安保人员有限,且因安保人员安全意识麻痹及疲劳性,易出现监控不到位,进而增加了事故发生的风险性。一旦发生事故,损失严重。因此,研制集移动机器人、消防机器人和巡检机器人功能于一体,具有环境感知、自动报警、初级火情处理、路线规划、动态决策功能的智能安防与灭火多功能机器人,可以满足市场对室内自动化消防与巡检查设备需求[1-4]。
1 机器人本体结构
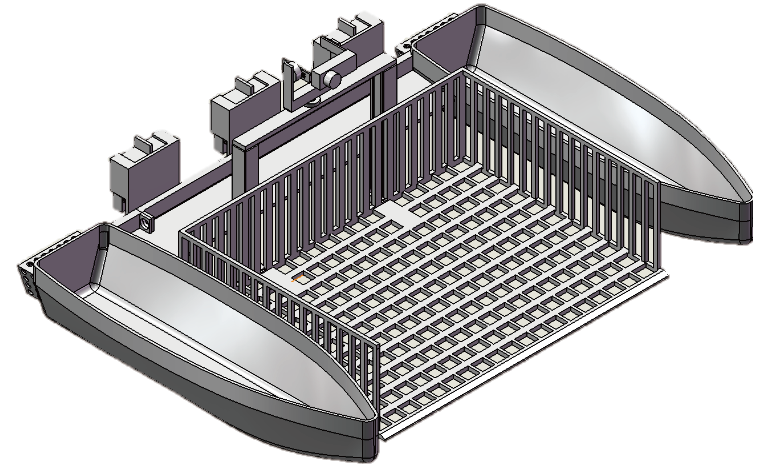
室内安防巡逻与灭火多功能机器人整体采用铝合金材料构成,由履带移动底盘、灭火设备、事故检测传感器、控制系统组成,理论模型如图1 所示。此机器人以卡片式电脑树莓派作为上位控制中心,单片机作为底层驱动,激光雷达获取周围实际环境信息绘制室内地图,结合温度传感器、火焰传感器、烟雾传感器检测事故发生。

图1 机器人理论模型
机器人工作时会事先记录室内环境,制定巡逻路线,在巡逻的同时对室内温度、火焰、烟雾情况进行监控以判断事故发生,并通过灭火设备进行及时处理。
2 控制系统硬件设计
室内巡逻与灭火机器人以树莓派3B+ 运行Linux 内核的Ubuntu Mate 系统作为上位控制中心,如图2 所示为实际树莓派3B+ 硬件。使用YDLIDAR 激光雷达采集环境点云进行完成地图构建,配合动态规划算法控制机器人整体工作[5-6]。

图2 树莓派实物
机器人的下位机控制板选用主频72 MHz 的STM32F103RET6 为核心,控制板除单片机最小系统外,还配有MPU6050 六轴IMU 传感器,其内包含三轴加速度计与三轴陀螺仪传感器,可以向上位机提供机器人实际位置欧拉角,以进行机器人导航使用,此外,控制板还具有电机驱动电路、编码器接口电路、舵机接口电路、传感器接口电路等多个机器人实际应用电路,局部电气原理图如图3 所示。

图3 局部电路原理图
3 控制系统软件设计
本文机器人控制系统软件设计总体依赖于ROS 分布式软件框架,其中上位控制层作为机器人控制服务器,与用户监控层都处于以Linux 系统为基础的ROS 环境下进行操作(图4)。下位驱动层对机器人实际执行器与传感器进行输入/ 输出控制,将数据通过RosSerial 协议上传到上位控制层。上位控制层结合下位层数据进行激光雷达数据采集、SLAM 建图算法、路径规划算法、事故检测算法的运行,上位层各算法之间以ROS 节点方式独立存在,并通过ROS 话题模型进行数据传送。用户通过上位监控层利用SSH 方式连接至机器人上位控制层,对机器人进行状态监控及行为控制[8]。

图4 机器人软件架构
4 系统实验测试
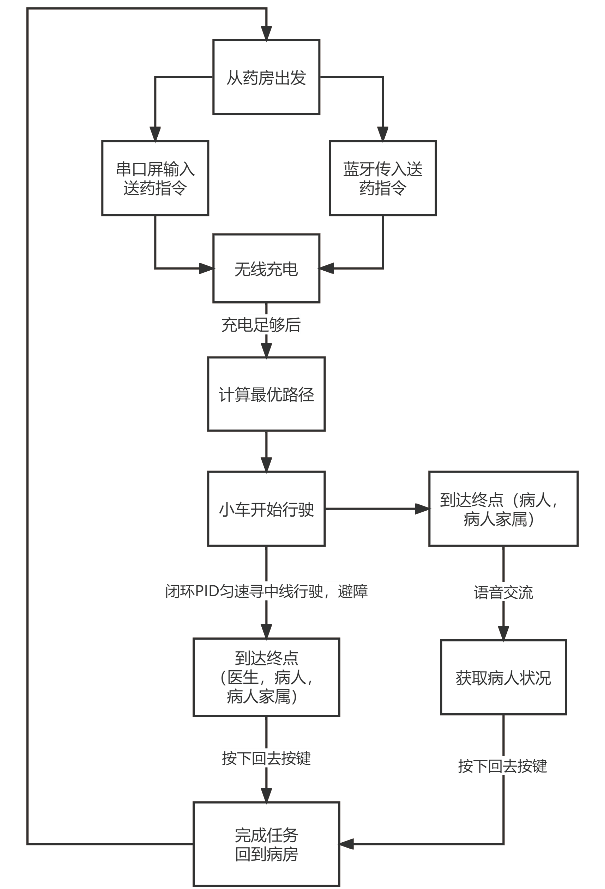
在本文机器人中电子地图构建功能在工作中起到重要作用。为验证本文设计机器人控制系统中电子地图构建的效果,遥控机器人在室内封闭场地移动并启动电子地图构建程序节点,待机器人移动一周后,观察机器人电子地图构建功能的完成度,整体实验流程如图5 所示。

图5 实验流程图
实际搭建测试场地如图6 所示,机器人实时建图结果由图7 所示。由对比可以观察出实际场景与机器人实时地图构建显示地形重合率95% 以上,可以满足使用需求。

图6 测试场地
5 结语
针对室内安防巡逻与灭火多功能机器人的工作特性,对机器人具体功能进行分析,设计并实现了室内安防巡逻与灭火多功能机器人控制系统,并对控制系统的电子地图构建功能进行样机实验。最终得出结论:本文控制系统可以实现室内安防巡逻与灭火多功能机器人的基本功能。

图7 机器人实时建图显示
参考文献:
[1] 王嵘,万永菁.一种基于SLAM的多功能探索机器人设计[J].机械与电子, 2019(9):51-53,58.
[2] 张琪琦,吴叶兰,王建涛,等.基于ROS的智能家居服务机器人设计[J].信息技术与信息化,2019(5):91-94.
[3] 寿佳鑫,张志明,苏永清,等.基于ROS和激光雷达的室内移动机器人定位和导航系统设计与实现[J].机械与电子,2018,036(011):76-80.
[4] 李铁妮,朱浩然,葛宇航.基于多传感器信息融合技术的室内火灾搜救型机器人设计[J].科技与创新,2019(4): 134-135.
[5] 王昊,关豪,王鹏飞,等.基于ROS系统的摄像头循迹小车设计[J].信息技术与信息化, 2019(02):96-98,103.
[6] 胡明玥,杜鹏.基于ROS的手柄遥控小车实现[J].电脑迷,2017(32):66.
[7] 程东锋,袁建军,徐庆龙.基于ROS的路探机器人智能导航设计[J].机电一体化,2018,24(1):35-39,51.
[8] 胡春旭,熊枭,任慰,等.基于嵌入式系统的室内移动机器人定位与导航[J].华中科技大学学报(自然科学版),2013,41(增刊1):254-257.
(本文来源于必威娱乐平台 杂志社2021年1月期)
关键词: 机器人操作系统 地图构建 路径规划 室内安防 202101

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
相关文章
-
-
-
-
-
-
2022-04-11

-
2022-04-11
-
2022-04-08
