垂直侵彻深度计算算法研究
。扩张状态观测器的结构框图,如图3所示。
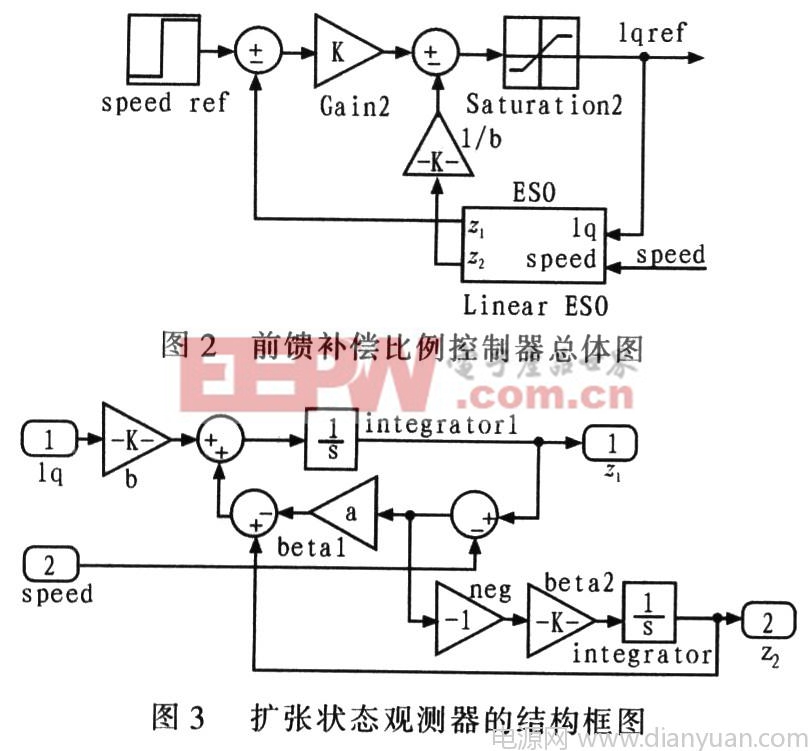
仿真中所用永磁同步电机参数为:极对数3,定子电阻0.57 Ω,定子电感0.015 5 H,转动惯量0.001 5 Kg.m2,转子永磁体磁链0.41 Wb,额度功率0.75 kW,额定转速2 000 r/min。
仿真结果图4a,图4b表明,常规直接转矩控制方法的转矩脉动较大,而基于定子磁链扩张状态观测器的直接转矩控制方法,在低速时(给定转矩1 N.m,转速10 rad/s)能获得准确的磁链估计值,可减小低速下的磁链观测偏差,提高转矩计算的精度,有效减小低速下的转矩脉动。
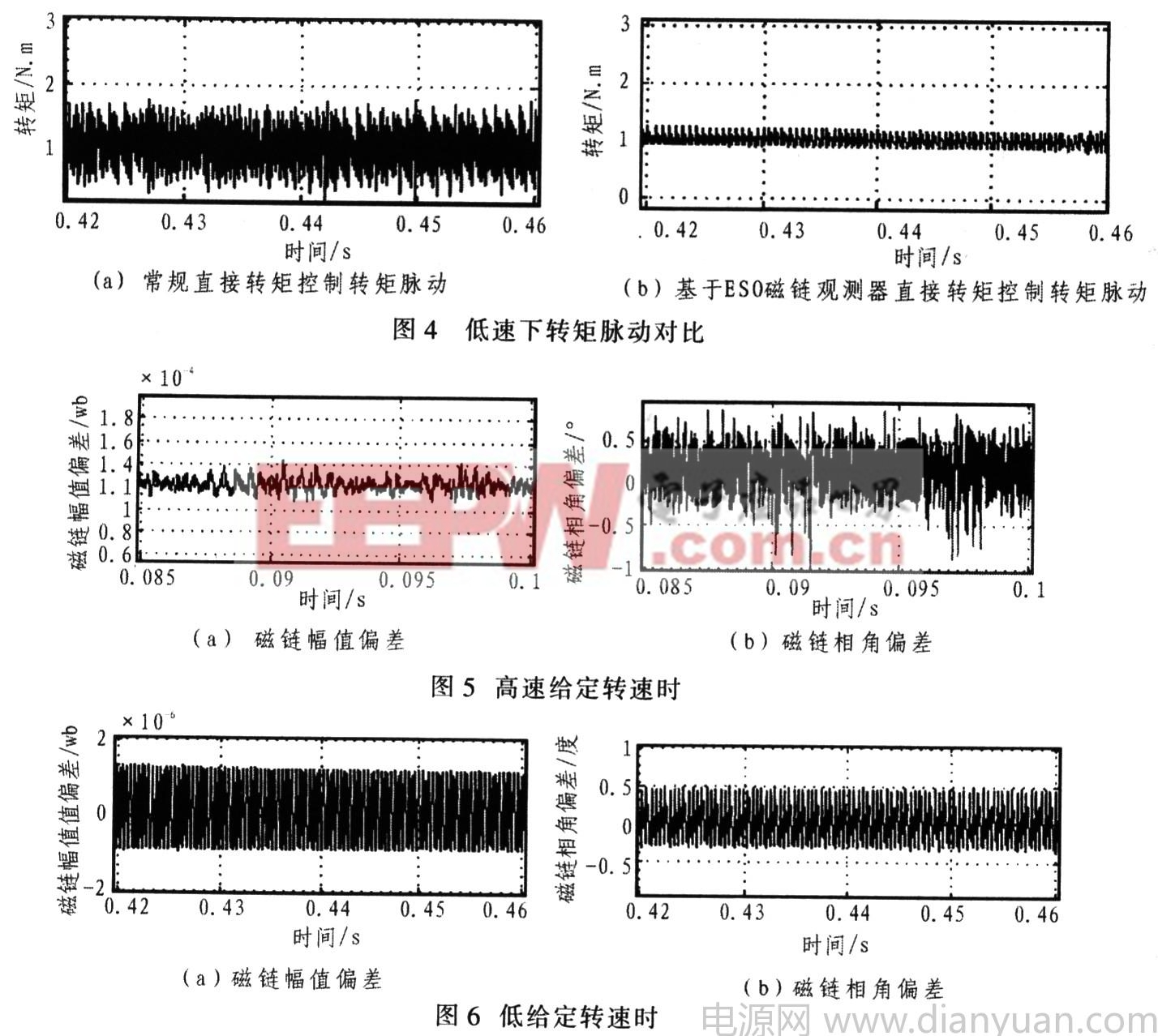
仿真结果图5、图6表明,在不同给定转速、电阻值为正常值的2倍时,基于定子磁链扩张状态观测器的直接转矩控制方法,在高速和低速以及转子电阻变化时都能较准确观测磁链,减小低速下以及转子电阻变化时的磁链观测偏差,对定子电阻的不确定性变化具有强烈的鲁棒性。并可同时观测出转子的位置和速度,实现无速度传感器条件下的电机控制。非线性扩张状态观测器无需知道电阻和转速的信息并能快速精确观测出不确定项,具有一定的实用性。
5 结论
本文利用扩张状态观测器(ESO)设计了感应电机转子磁链观测器,解决了实际中存在的转子电阻不确定的问题。该方法对转子电阻的变化具有极强的鲁棒性。仿真实验表明,即使电阻变化1倍时,观测器也可得到准确的转子磁链。在低速情况下,该方法同样有效。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码