垂直侵彻深度计算算法研究
令系统的总扰动项a(t)=f(y,t)+w(t)+(b-b0)u(t),该扰动项包括内部扰动f(y,t)+(b-b0)u(t),也包含外部扰动W (t)。把a(t)作为一个扩张的状态,令x1=y,x2=a(t),则式(6)的动态系统可写成如下状态方程:

式(7)中,令c(t)=a(t),则可以构造出线性ESO:
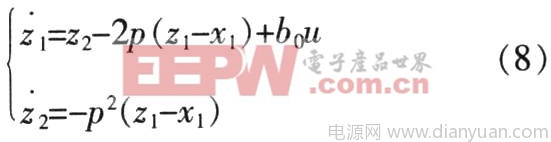
式中,-p为观测器二重极点,p>0。
对应的线性控制律为:
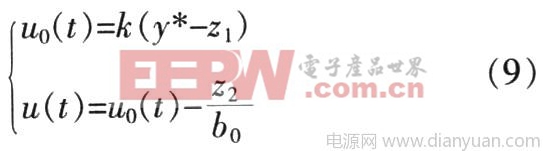
式中,y*为系统的参考输入。
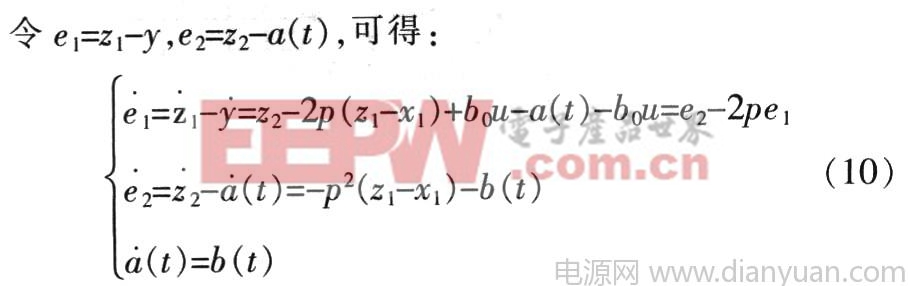
这是一个二阶连续系统,其稳定的充要条件是二重极点P>0。只要选择合适的期望闭环极点-P>(p>0),就能保证ESO的观测效果。
根据永磁同步电机的一阶微分方程模型,结合扩张状态观测器的设计方法,设计控制器,分析如下:

![]()
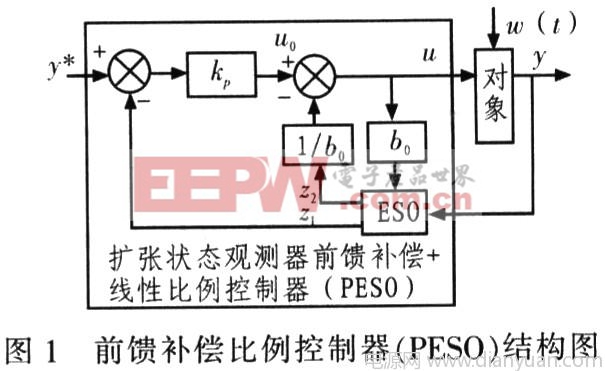
由式(11)~(12)可看出,负载转矩、摩擦系数、惯量的扰动以及由于b0估计误差所造成的扰动都可在a(t)中反映出来。如果能对a(t)进行观测并予以补偿,则可显著的提高系统的抗扰动能力。控制器结构图如1所示。
于是得到基于扩张状态观测器的比例控制器的表达式:
(1)ESO表达式:
(2)控制律表达式:
根据理论分析,ESO的观测效果取决于极点-p>(p>0)。和ESO的跟踪速度有关,P越大,ESO跟踪输出信号响应就越快,即z1对速度w的响应就越快。比例增益kp通常应取得较大,但过大会使速度响应振荡,造成系统不稳定。
4 基于扩张状态观测器的控制器算法仿真
在Matlab/Simulink平台仿真验证基于扩张状态观测器的控制器设计方案。根据图1搭建控制器的Matlab/Simulink仿真模块,如图2所

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码