一种船载光电稳定跟踪伺服系统的设计与实现
2.4.3 DSP伺服控制器位置环路控制算法
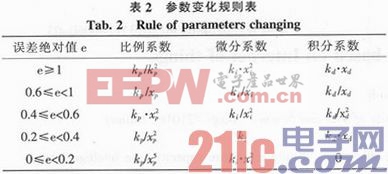
位置环主要实现对目标指令的快速准确跟踪,其控制算法采用变参数PID控制,变参数PID控制是一种通过误差大小改变比例、积分、微分作用强度的控制算法。变参数PID控制参数随误差变化情况的规则如表2所示,其中Kp、Ki、Kd分别为比例、积分、微分系数,它们的值可通过常规PID整定的方法得到。而xp、xi、xd分别为比例、积分、微分的变化量,只要误差区域划分合理,就能很好地减小干扰对转台的影响,加快系统动态响应速度。
3 控制系统软件设计
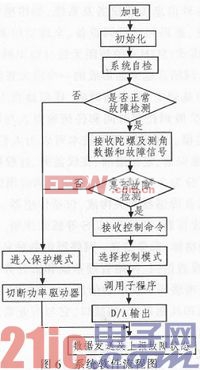
系统软件在CCS3.3开发环境下用C语言编写,采用模块化设计,系统软件由1个主程序3个子程序组成,3个子程序分别对应自动跟踪、引导跟踪、手动跟踪三种工作状态,主程序接收上位机控制命令后对应相应的工作状态调用子程序,系统软件主程序流程如图6所示。
4 系统电磁兼容设计
光电稳定跟踪伺服系统集光学、电子、电气、精密机械为一体,工作时会产生各种感应和干扰,这些干扰有可能影响系统正常工作,因此伺服系统的电磁兼容设计不容忽视。本系统电磁兼容设计主要从以下几个方面考虑:
1)屏蔽,采用带屏蔽层的信号线,伺服控制机箱机械结构采用屏蔽设计。
2)隔离,电路设计中高压与低压隔离,强电与弱电隔离,动力电与信号电隔离,模拟电路和数字电路分开,交流电源与直流电源分开。
3)接地,数字地与模拟地分离,最后接于电源地,接地线短而粗。
4)滤波,对测角编码器信号光纤速率陀螺信号进行数字滤波;对功率驱动器的功率电源加无感电容滤波;对电源及其他信号进行有效滤波,减小干扰。
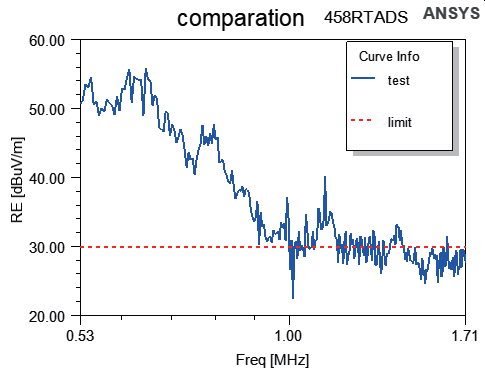
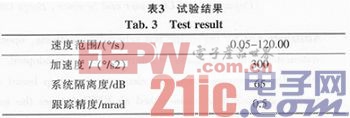
5 系统工程试验测试结果
经测试,系统试验结果如表3所示。
6 结论
文中介绍的船载稳定伺服跟踪系统研制出工程样机两套,经过工程测试,该伺服系统工作稳定可靠,系统电磁兼容性能良好,对同类伺服系统的设计和制造提供了经验和依据。
关键词: 稳定跟踪 TMS320F28335 数字伺服控制器 电磁兼容

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码