一种船载光电稳定跟踪伺服系统的设计与实现
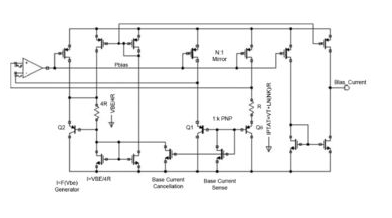
无刷直流力矩电机的电流采样由功率驱动器中的霍尔电流传感器完成,逻辑组合电路对三路电流采样信号进行逻辑组合,输出与电机电枢电流成正比的电流信号,此信号作为电流环路的电流反馈信号。令无刷直流力矩电机位置传感器的转子位置信号分别为Sa、Sb和Sc,无刷电机三相绕组上的电流传感器的输出信号分别为ia、ib和ic,则电机的工作电流Id与三相绕组位置信号的逻辑运算关系如下:
2.3 电流调节器的设计与实现
由于电流环超调量越小越好,电流调节器采用PI调节器,把电流环校正成I型系统,其传递函数为:
式中Ki为电流调节器的比例系数,τi为电流调节器的超前时间常数。
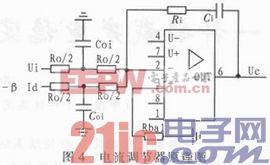
电流调节器原理图如图4所示,其中-BId为电流负反馈电压,Ui为电流给定电压即稳定环路输出电压信号,Uc为电流调节器输出即功率驱动器的输入信号。令Toi为电流滤波时间常数,根据运算放大器的电路原理,参数计算公式如下:

式(3)、(4)、(5)用于计算电流调节器具体参数。
2.4 DSP伺服控制器的设计与实现
2.4.1 DSP伺服控制器的硬件设计
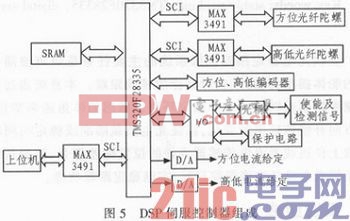
DSP伺服控制器硬件电路主要由主控芯片TMS320F28335、DSP外围电路、D/A转换电路、故障检测电路、MAX3491电平转换电路、安全保护电路等构成,其组成框图如图5所示。系统外扩了512Kx16位SRAM,方便系统调试时的外部仿真;利用DSP芯片自带的3路SCI,经接口芯片MAX 3491电平转换后,将TTL电平信号转换为RS422电平信号,实现DSP伺服控制器与光纤速率陀螺及上位机的通信,所有输入输出的I/O信号均通过光耦与外部隔离,起到保护DSP内核的作用。DSP伺服控制器的方位、高低两路输出信号经过D/A后分别作为电流调节器的电流给定电压信号。
2.4.2 DSP伺服控制器稳定环路控制算法
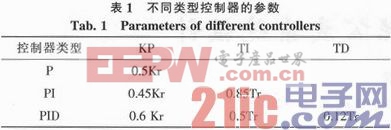
稳定环路为电流环外环,DSP伺服控制器采集光纤速率陀螺速率反馈信号,经过数据处理与数字滤波后作为速率反馈数据与位置环路送出的速率数据给定数据进行PID运算,其结果经过D/A后作为电流环的电流给定电压信号。稳定环路控制算法采用临界比例法,临界比例法是一种经验方法,这种方法首先将控制器选为纯比例控制器,并改成闭环,改变比例系数,使系统对阶跃响应达到临界状态,这时记下比例系数Kr,临界震荡周期为Tr,根据Ziegler-Nivhols提供的经验公式,就可以由这两个基准参数得到不同类型控制器的参数,如表1所示。调试时,先采用临界比例法得到初始参数,然后在此基础上采用凑试法进一步完善。
关键词: 稳定跟踪 TMS320F28335 数字伺服控制器 电磁兼容

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码