基于AT89S52的多功能智能小车设计
2.4 避障模块
小车在运行中如果前方有障碍物,小车则开始向后后退一段时间后,向左运动,在向左运行一段时间后,再开始向前运行。在整个调向的过程中,蜂鸣器响动。这个就是避障功能。该功能是由安装在小车前方的一对红外发射管实现,原理与寻迹模块相同。
2.5 遥控模块
遥控模块由红外发射与接收两部分组成。红外发射采用常用的TC9012集成芯片,将某个按键所对应的控制指令和系统码(由0和1组成的序列),调制在38 kHz载波上,然后经放大、驱动,红外发射管将信号发射出去。接收部分采用红外一体化接收头,当接收到38 kHz红外信号后就输出低电平,没有接收到就输出高电平,电平信号由单片机的外部中断来接收。信号的下降沿触发外部中断。为了识别一个完整的键信号,必须对每一个编码脉冲的宽度进行测量,利用单片机中的定时器/计数器来测量脉冲宽度,以判别接收到的脉冲是0还是1。通过遥控模块,可将按键值显示在数码管上,并控制小车的行进方式。
2.6 声光控模块
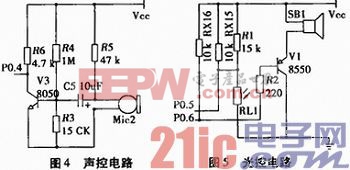
该小车具有简单的声控功能,P0.4为机器人的声控检测端口,在运行为前进状态时,可以通过声控来控制它的运行与停止。声音的输入是通过话筒,由话筒对声音信号进行识别,如图4所示。由于电路能有效去除杂波,所以仅能对响度较大的声音进行识别(如拍手声)。像正常的说话声对本电路滤除,不会产生信息的输入。同时该小车还具有光控功能,如图5所示。当为白天或黑夜时可以通过P0.5端口中的光敏电阻来进行判断,以方便完成机器人夜间自动照明等功能。当光线较暗时,由P0.6端口输出信号控制蜂鸣器发声。
2.7 通信模块
通信模块是采用AT89S51自带的全双工串行通信口P3.0和P3.1来实现。可用电脑通过串口向小车发送数据,数据在数码管上显示,并且小车根据数据执行相应的动作,如前进、左转、右转、后退等。通信波特率为9 600,数据为8位,无校验位。
3 系统软件设计
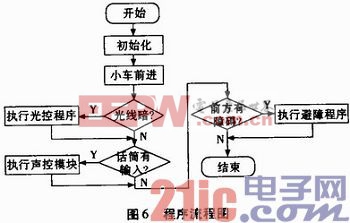
该智能小车的软件控制部分采用C语言编程,借助C语言的强大功能来实现单片机AT89S52的控制功能。小车各个模块都可以编写相应的程序,也可以将这些分立的程序模块(一般寻迹模块除外)组合起来,完成强大的功能。主流程图如图6所示。
4 结论
本文提出了一种基于AT89S52单片机为控制核心的多功能智能小车的设计方案,该方案以红外传感器作为路径信息采集手段,以LG9110芯片来控制并驱动电机运行,实现小车在固定轨迹上自动循迹、避障。同时还具有声光控功能,能根据外界声音、光线来控制小车的动作。整个设计功能丰富,电路简单,成本低且易于实现,具有很强的操作性。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码