基于AT89S52的多功能智能小车设计
2.2 电机驱动模块
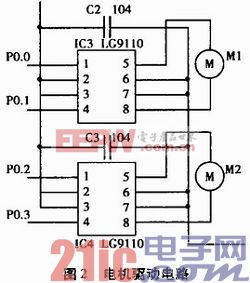
智能小车采用前轮驱动,左右前轮各用一个直流电机驱动。电机驱动芯片采用LG9110,该芯片两个输出端能直接驱动电机的正反向运动,具有较大的电流驱动能力。单片机的P0.0,P0.1,P0.2,P0.3分别连接到LG9110的两个输入端,用以驱动电机M1和电机M2,如图2所示。不同的输入信号控制电机的正转与反转,以完成机器人的前进,后退,左转,右转,遇障碍物绕行等基本动作。两个电机同时正转时,小车前进;两个电机同时反转时,小车后退;左侧电机不转,右侧电机正转,小车左转;左侧电机正转,右侧电机不转,小车右转。这些基本动作正确,实现简单。
2.3 寻迹模块
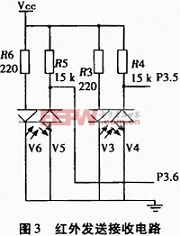
寻迹在这里是指沿黑线行走,它靠小车前端底部的两对红外发射和接收探头来完成。如图3所示,V6、V5为小车左侧的红外发射与接收管,V3、V4为小车右侧的红外发射与接收管。发射管发出红外线,当碰到黑色或不反光的物体时,红外反射量大量减少,若碰到白色或反光的物体时,红外反射量则较多,红外接收管将接收的反射光转化成电压值,由P3.5,P3.6送回到单片机,经过处理后控制信号由P0.0,P0.1,P0.2,P0.3口输出给电机驱动电路的LG9110芯片,从而达到驱动小车行走和循迹的目的。循迹时,由于红外线在白色地板和黑线上的反射系数不同,所以可以根据三极管接收红外线的强弱来决定小车的走向。当左右接收管都能接收到反射回来的红外线,则小车直线前进;当左边接收管接收不到反射回来的红外线,右边接收管能接收到时,说明小车向右偏离黑色轨道,则小车向左转动;同理右边接收管接
收不到反射回来的红外线,左边接收管能接收到时,说明小车向左偏离黑色轨道,则小车向右转动,从而实现自动循迹。本设计中红外传感器离地面垂直距离为1~1.5 cm,能在没有强烈日光干扰或在有日光灯的房间里,完全能满足探测要求,具有很好的可靠性与抗干扰能力。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码