基于Camera接口的船用导航雷达显示设计
2.2 回波近区覆盖、远区分裂的补偿
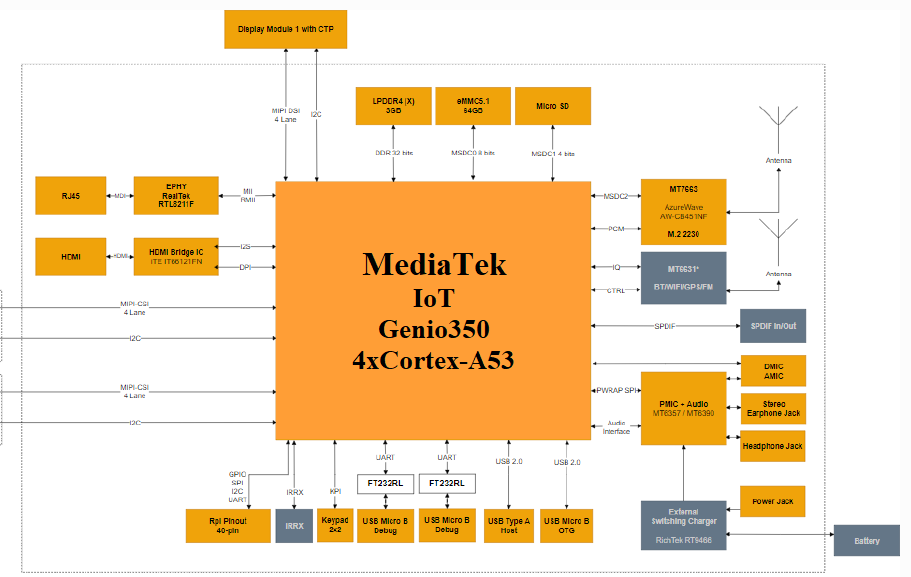
雷达显示系统接收的是雷达触发、雷达回波和方位信号,是一个极坐标系,显示时以行场同步扫描的方式进行,是一个直角坐标系。由于从极坐标转换成直角坐标固有的非线性影响,以及方位与雷达触发的异步关系,会出现回波的近区重叠和远区分裂的现象。解决近区的覆盖,在写入帧缓存的回波值之前,先读出该地址原有值,若大于则写入,否则保持原值。远区回波分裂采用两种方法补偿;(1)增加坐标转换查表法中正、余弦函数值的精度;(2)采用插值的方法,在一次方位处理完成后,在下一次触发前再以当前的回波值辅以新的方位进行显示处理。
插值的示意如图3所示。捅值的数量由雷达显示半径决定,而一般插值后的个数应大于或等于显示圆周的像素点,这样才能保证回波充满显示器所有像素,避免出现回波的分裂。由于转换过程中的非线性,近区不需要插值,为解决时序紧张的问题,可选择从某一显示距离开始插值,即远区补偿。
2.3 ITU—R BT601/656视频编码
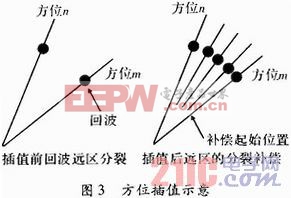
Camera接口支持两种接口的输入视频(1)ITU RBT-601 YCbCr 8位标准。(2)ITU R BT-656 YCbCr8位标准。前一种标准输出行场同步信号、8位宽度的数据信号和数据同步时钟,后一种标准的不输出行场信号,将定时基准码和行场消隐数据编在8位数据信号中,由Camera接口捕捉定时基准码实现数据的行场同步。设计采用ITU R BT-656 YCbCr 8位标准,视频数据的转换和编码由FPGA完成,组成原理框图如图4所示。
数据采集模块实现R(Red)、G(Green)、B(Blue)数据的同步处理,以便稳定的写入FIFO。FIFO控制模块完成对FIFO的读写控制和数据的缓存。RGB转YCbCr模块将输入的RGB数据转换成相应的YCbCr数据,R、G、B信号到Y、Cb、Cr转换公式为
Y=16+0.275R+0.504G+0.098B
Cb=128-0.148R-0.291G+0.4329B
Cr=128+0.439R-0.368B-0.071B (2)
ITU656协议产生模块用于控制产生ITU R BT-656YCbCr 8位标准的视频数据和同步时钟。
2.4 Camera接口
ITU R BT-601/656视频送至ARM的Camera接口,内部的测试样板可用来校准输入同步信号作为HREF(行信号)和VSYNC(场信号),CatchCam实时捕捉ITU信号。Camera接口内存在两个通道:一是Preview Scaler(以下简称P通道),用来产生较小的图像,用于预览;二是CodecScaler(以下简称C通道),用来产生编解码用途的视频信号。P通道和C通道各自保持独立。
Camera接口有4个DMA端口,分别是在AHB总线上进行预览的MSDMA输入,进行编解码的MSDMA输入,P通道颜色转换后输出DMA,C通道颜色转换后输出DMA。MSDMA读取Y:Cb:Cr4:2:2、Y:Cb:Cr4:2:0或RGB图像。4个主端口支持各种各样的应用,寄存器可分别设置4个DMA端口的使能。
Camera接口不能为默认优先级AHB总线的设备,其优先级必须与其他循环或通知仲裁优先级设备区别开,并保持独立,为保证显示的流畅性,包含Camera接口的AHB总线须比其他Multi—AHB总线的优先级高。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码