基于TI Z-STACK的智能小车调度系统设计
通信指挥车(Sink)在收到Endpoint发来的无线网信息后触发AF_INCOMING_MSG_CMD事件,然后执行Car_Dispatch_MessageMSGCB(MSGpkt)回调函数,首先判断信息类型(探路车、架桥车还足运输车发送的),然后进行分析和下发指令(例如若是探路车发来路面遇阻信息,则按图3向架桥车发送指令0x2A0x00 0x00 0x6F 0x79 0x02 0x01 0xFF 0x23,启动架桥)。
3.3 51单片机程序实现
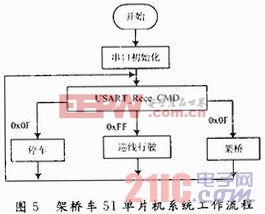
51单片机模块主要用于小车巡线控制及串口通信。以架桥车为例,工作流程如图5所示。串口设置为接收中断模式,全局变量USART_Re ce_CMD用于控制小车的运行状态,当通信指挥车下发指令后,车载CC2430模块接收数据并进行解析,通过串口向51单片机发送指令,51单片机在串口接收中断函数中修改USART_Rece_CMD的值,进而改变小车的运行状态。
4 结语
本系统以51单片机为小车控制平台,以CC2430为通信平台,通过Z-STACK实现无线网络组建,并以串口通信为纽带,实现51单片机和CC2430的通信,由此实现了简易的小车调度。本系统还可进行进一步扩展,例如开发上位机应用程序对协调器进行控制,可实现人机交互。本系统综合运用了单片机、无线传感器网络及传感器的知识,可应用于物联网应用技术的专业实训。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码