基于TI Z-STACK的智能小车调度系统设计
摘要:针对高职院校物联网应用技术专业实训问题,基于MCS-51及CC2430单片机、红外及超声波传感器,设计了一套基于TI Z-STACK协议栈的智能小车调度系统。分析了无线网的组建流程及软件实现方法。
关键词:Z-STACK协议栈;智能小车;物联网实训;CC2430
无线传感器网络是高职高专物联网应用技术专业课程体系中的核心课程之一。目前,各院校的无线传感器网络课程实验实训平台多以51内核的CC2430为主,如何快速从51单片机转型到掌握CC2430是专业实训平台需解决的核心问题。为此,设计了本套基于单片机及TI Z-STACK协议栈的智能小车调度系统。
1 系统组成及功能
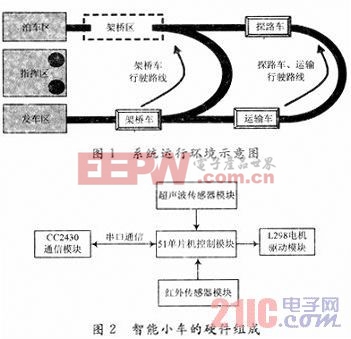
本系统由模拟通信指挥车(Coordinator)、探路车(Sensor Endpoint)、架桥车和运输车(Endpoint)及沙盘等构成,在图1所示的模拟调度环境运行。由探路车先行获取路面信息,发送给通信指挥车,由通信指挥车调度其他车辆行驶。探路车若进入架桥区,则向通信指挥车报告路面遇阻信息,然后由通信指挥车下发指令,让运输车停车,让架桥车赶赴架桥区架桥。待桥面架好后,探路车再次向通信指挥车报告路面恢复信息,由后者下发指令,调度探路车、运输车继续行驶,最终到达指定泊车区。
2 硬件电路设计
通信指挥车、架桥车、运输车的硬件电路包括51单片机控制模块、红外传感器模块、L298N电机驱动模块及CC2430通信模块,探路车还包括超声波传感器模块,如图2所示。其中,红外传感器模块主要用于巡线;超声波传感器用于探测架桥区的断裂路面;L298N电机驱动模块用于驱动小车电机;51单片机控制模块用于小车巡线控制,并与CC2430通信模块通过串口方式进行通信。CC2430通信模块是调度系统的核心,用于完成无线通信网络组建和数据传输功能。由于CC2430和51单片机控制模块分别工作于3.3 V和5 V逻辑电平,故在进行串口通信时需进行电平转换。本系统采用在51单片机的TX和CC2430的RX引脚间接100 Ω电阻的方案保证了二者通信正常运行。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码