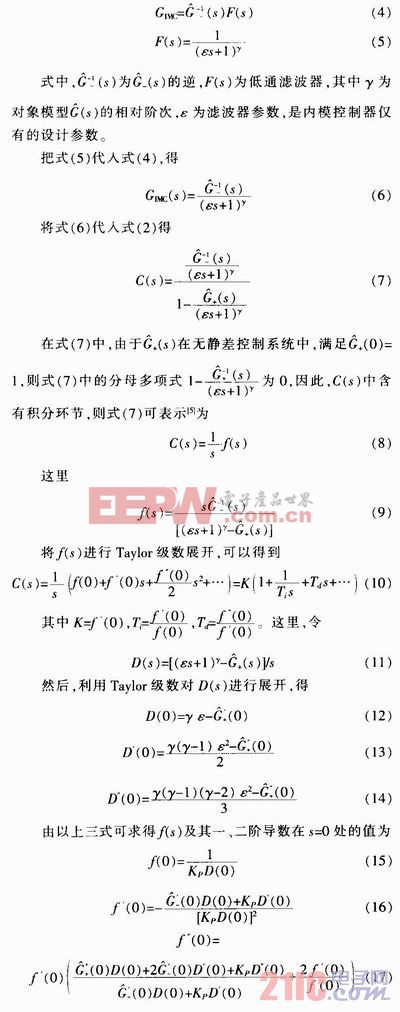
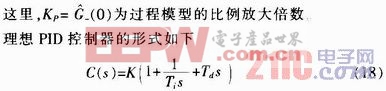
基于Taylor展开法整定MIC-PID控制器参数 时间:2012-07-24来源:网络 步骤2:IMC控制器设计 在设计内模控制器时,需在最小相位的上增加滤波器,以确保系统的稳定性和鲁棒性。定义内模控制器为 上面的公式可以用来求取控制器的增益、积分时间和微分时间,这些参数是过程模型参数和IMC滤波器时间常数的函数。 1 2 3 4 关键词: 控制器 参数 MIC-PID 展开 Taylor 基于 阅读全文 加入微信获取电子行业最新资讯搜索微信公众号:EEPW或用微信扫描左侧二维码