基于卡尔曼滤波器及多传感状态的融合估计算法介绍
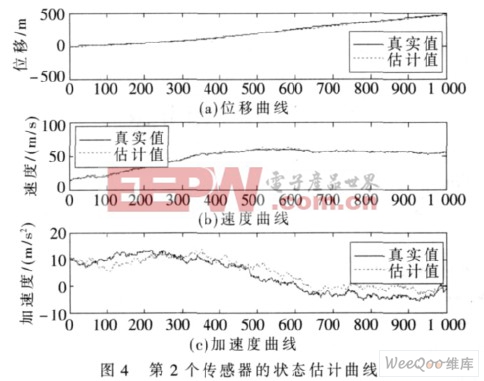

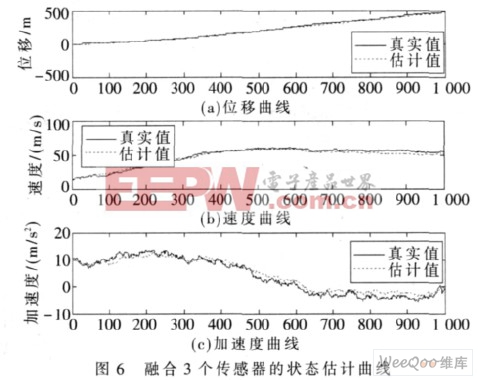
信息融合技术具有提高系统的可靠性和稳定性等优点, 状态融合估计是其中研究热点之一。本文将基于Kalman 滤波的多传感器状态融合估计方法应用到雷达跟踪系统, 仿真实验表明, 融合3 个传感器的信息所获得的状态估计误差小于利用任何单传感器进行Kalman滤波得出的状态估计误差, 因而本方法对雷达系统的跟踪是很有效的。本方法可推广用于组合导航、信号处理、图像处理、故障检测与容错等应用领域。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码