基于卡尔曼滤波器及多传感状态的融合估计算法介绍
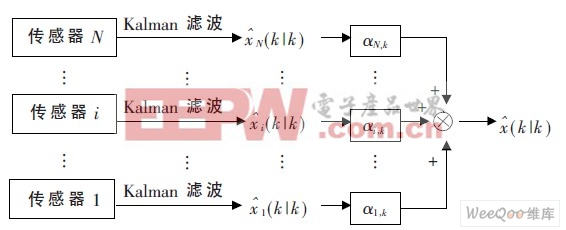
图2 联邦融合估计算法流程图
3 雷达跟踪系统仿真
考虑具有3 个传感器的雷达跟踪常加速度模型,其离散状态方程为:
式中T 表示采样间隔。状态向量x(t)= ,其中
,其中 和
和 分别表示目标在tT 时刻的位移、速度和加速度。z(i,t)(i=1 ,2,3) 表示3 个传感器的观测,它们分别观测位移、速度和加速率。即:C(1)=[1 0 0] ,C(2)=[0 1 0] ,C(3)=[0 0 1] 。v(i,t) 和w(t) 分别是观测误差和系统误差, 都假设为零均值的高斯白噪声, 方差分别为R(i)和Q。本节的目的是融合3 个传感器的观测信息, 以获得对目标x(t)的最佳估计。这里T=0.01 s ,Q=0.1 ,R(3)=20 ,R(2)=15 ,R(1) =8 。初始值为x (0) =[0 1510] 和P0=0.1·I3。
分别表示目标在tT 时刻的位移、速度和加速度。z(i,t)(i=1 ,2,3) 表示3 个传感器的观测,它们分别观测位移、速度和加速率。即:C(1)=[1 0 0] ,C(2)=[0 1 0] ,C(3)=[0 0 1] 。v(i,t) 和w(t) 分别是观测误差和系统误差, 都假设为零均值的高斯白噪声, 方差分别为R(i)和Q。本节的目的是融合3 个传感器的观测信息, 以获得对目标x(t)的最佳估计。这里T=0.01 s ,Q=0.1 ,R(3)=20 ,R(2)=15 ,R(1) =8 。初始值为x (0) =[0 1510] 和P0=0.1·I3。
设传感器的采样点数为600 , 则10 次Monte Carlo仿真的统计结果如表1 所示。表1 给出了估计误差绝对值均值比较,3 个传感器融合的综合估计误差是最小的。
表1 估计误差绝对值均值比较。

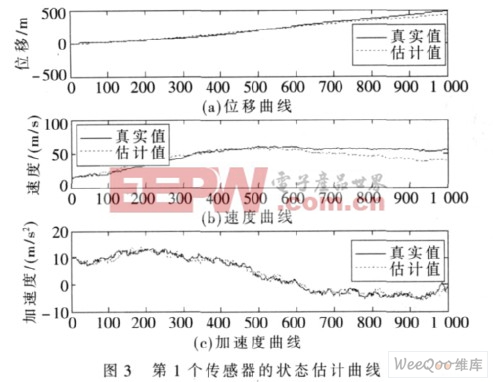
第1 个传感器、第2 个传感器、第3 个传感器及3个传感器融合的状态估计曲线分别如图3、图4、图5、图6 所示。图中横轴为仿真步数, 每步时间为0.01 s 。若仔细观察这些状态估计曲线,则单传感器状态估计曲线均有不足, 如图3 对速度跟踪不是很好, 图4 对加速度跟踪不是很好, 图5 对速度跟踪也不是很好, 只有图6对位移、速度及加速度跟踪均较好。由此可见, 与单传感器Kalman 滤波的结果相比,3 个传感器融合所获得的估计值都更加贴近于目标信号,从而证明了本文算法的有效性。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码