FMCW雷达系统及其前端数据采集模块设计
3 数据采集系统设计
3.1 VCO调制电压
压控振荡器VCO工作需要通过一个调制电压来实现发射信号频率的变化,在上文中已经提出,同时测距并测速,FMCW雷达的调制信号波形为三角波模式,就需要一个三角波调制电压来使VCO工作,可是利用单片机采用PWM方式实现,也可以直接使用三角波发生电路。但无论采用哪种方式,在实际应用的过程中,线性总是不理想的。因此,适当扩大三角波电压幅值,然后取其中线性较好的一段来控制VCO工作。三
角波发生电路如图4所示。
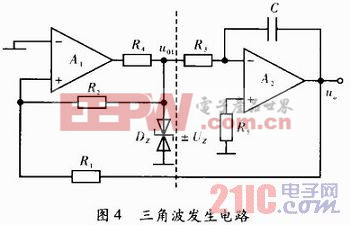
振荡频率为
![]()
调节电路中R1,R2,R3的阻值和C的容量,可以改变振荡频率。而调节R1和R2的阻值,可以改变三角波的幅值。
3.2 滤波放大电路
雷达传感器工作时输出的中频信号需经一系列滤波、放大和DSP处理后,才更易于从中分析得到所需的目标信息。尤其是当雷达工作于FMCW模式时,输出信号要先经滤波处理滤掉调制信号后才能进行放大处理,否则会使得调制信号被过分放大导致信号饱和失真。在雷达工作于FMCW模式用于测距功能时,外接滤波放大电路的目的主要是为了去掉调制信号和进一步放大输出信号;而当雷达工作于CW模式用于测速功能时,外接滤波放大电路的目的主要是为了滤除干扰和噪声,同时也进一步放大输出信号。图5为工作于CW模式的外置滤波放大电路,其增益为60 dB,带宽为30 Hz~50 kHz。图6为该滤波器的频率响应曲线。图7为工作于FMCW模式下的高通滤波电路,增益为60dB、频率为1kHz。图8为其对应的频率响应曲线。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码