超声波的移动机器人导航的设计原理
3.5 循环控制与轮询测距
由于超声波之间有干扰,采用轮询的方式依次打开超声波,每次只测一个,这样可以有效地避免干扰,为了提高实时性可以控制定时器周期,比如设置为35ms,这样四路超声波轮询一次大约为140ms,足以满足实时要求。
4 机器人控制的实现
图3 为利用超声波的反馈信息控制机器人直流电机闭环系统的总体结构图。
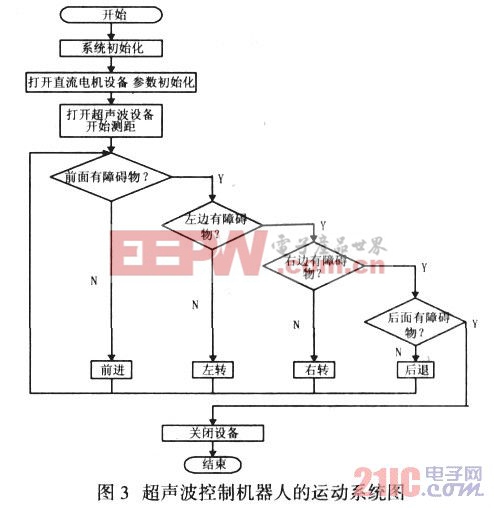
linux 系统中超声波传感器为只读的字符设备,具体应用为在应用程序下打开超声波设备,然后在驱动中测距,测得的数据传到应用程序,应用程序中有超声波的避障算法,根据算法判断障碍物的位置给直流电机控制信号进行避障导航。
触摸屏中的图形界面中含有机器人的指令设置, 可以设置运行速度,图像采集与超声波模块的打开与关闭,是否开启机器人模糊算法运行轨迹还是使用普通的PID 调节, 这使得机器人有很多种方案可以选择。
机器人的每一次行为都是根据超声波传感器测得的值和当前机器人运行的即时速度来来给出将要运行的时间, 在遇到障碍物时(0

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码