基于二维物体斜面黑线运动智能小车的设计
3 系统软件设计
系统软件设计采用凌阳独有的C语言和汇编混合使用对单片机进行编程以实现各项功能,主程序主要起到一个导向和决策功能。为了让小车能够准确的沿黑线运动,所设计的程序就应该让控制系统实时地监视光电传感器地状态,调整小车运动一直回到正常运动状态中。因此,主程序主要包括小车运动子程序、光电检测的子程序、显示时间的子程序清看门狗子程序等。小车运动程序流程图如图5所示。
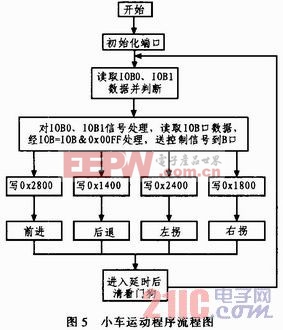
在程序中,为了小车运动能够准确地判断出当前所处的运动状态,让单片机及时地读取B口低8位的数据。为了小车运动的连贯性和准确性,在流程图中使用了延时程序。同时,为了避免出现单片机系统自动复位,对小车的运动造成影响,设置了清看门狗程序。
4 系统测试
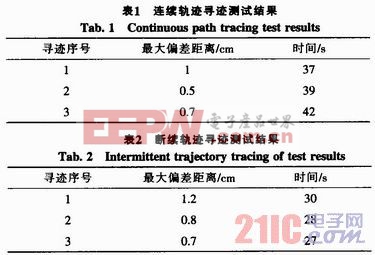
在此设计的基础上,通过安装调试,整个智能小车系统已经形成,为了能让小车能很准确沿黑线运动,利用光电测试模块,由单片机控制物体作任意形状的寻迹运动,并能判断间断线段,测试结果如表1、表2所示。在运动时间测试时采用精度为0.01的秒表,检测小车运动时显示时间的正确性,如果程序中存在误差,就应该通过软件或者硬件的方法修正误差,进一步减小误差。测试时间过程如表3所示。

5 结束语
本系统以凌阳SPCE061A单片机芯片为核心部件,主要是利用继电器控制技术和光电传感器的检测技术二维斜面的黑线运动智能小车的设计,在系统设计过程中,力求硬件线路简单,充分发挥软件编程的方便灵活的特点,来满足本设计的要求。从测试项目来看,所设计出的小车能够实现误差较小的沿黑线准确运动和同时显示运动时间的要求。在运动方面,整个运动过程比较连续,但在转弯幅度比较大的地方时,小车运动时就需要时间来计算、调整。在显示时间方面,虽然存在一定的误差,考虑到误差很小,以及程序的执行花费的时间,可以忽略不计。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码

