基于二维物体斜面黑线运动智能小车的设计
2.2.2 路面检测模块选择
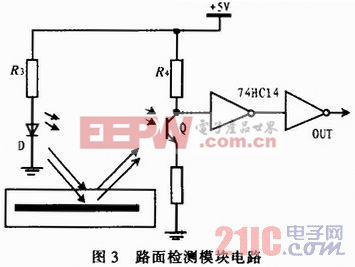
在小车前面的左右两端分别安装反射式光电传感器,安装的宽度至少要大于黑线的宽度,如图3所示。小车运动路面是在白色纸张上面铺设黑色胶布作为中心,这主要基于光电传感器在检测到白色和黑色时两种不同的电平状态的原理。当光电传感器面对黑线时,发出的光被吸收,不能发生发射,此时光敏三极管Q不能导通,输出为低电平;当面对白线时,光电二极管发出的光经过白线反射到达光敏三极管Q,使Q导通从而输出高电平,再经触发非门74HC14的两次触发反相,消除干扰,把信号送到单片机相应的引脚。由此可以在小车行进的时候,让系统的控制模块同时监视两个光电传感器的状态,并送到单片机的相应引脚,经过程序算法处理后送到电机控制引脚,根据不同的信号组合实现不同的运动调整方式,完成小车的黑线运动。
2.2.3 电机控制部分的单元电路设计
电机驱动部分分为左右两部分,两个电机配合工作负责悬挂物体的拉动定位。两个电机为齿轮减速同步电机,转数恒定为20 r/min,设计两个控制电路来控制电机的开关。继电器对电动机的开或关进行控制,通过引脚电平的切换对电机的转向进行调整。
电路采用光耦继电器式对电机的转动及转向进行控制,如图4所示,各端口功能为,IOB8控制电机1的正转,IOB9控制电机1的反转,IOB 10控制电机2的正转,IOB11控制电机2的反转。
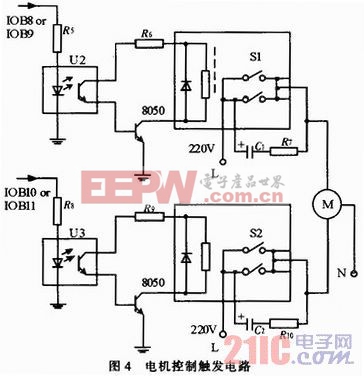
当IOB8或IOB10为高电平时,光耦U2导通,8050导通,+12 V电压驱动继电器,从而使交流220 V电压加到电动机上,电动机正转。当IOB9或IOB11为高电平时,光耦U3导通,8050导通,+12 V电压驱动继电器,从而使交流220 V电压加到电动机上,电动机反转。当IOB8或IOB10与IOB9或IOB11都为低电平时,电机停止转动。由于所选电动机具有抱闸功能,为齿轮减速电动机,因此在断电的时候,几乎能同时停止运动,保证了物体运动的准确性,而且外围电路简单,很容易操作。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码

