基于AT90CAN128单片机的某车型CAN总线系统设计
2 车载CAN总线控制系统[4]的设计
由于对实时性要求比较高,所以采用高速CAN总线,信息传输速度为500kbps,连接的主要对象有:驾驶员计算机、发动机、自动变速器、安全气囊、仪表信号采集系统、联合制动系统等。由于各个节点作用不同,所以在硬件搭建和软件设计以及通信协议的制定上都采用了相应的方案。下面以联合制动单元为例,做具体分析。
联合制动单元接收由驾驶员计算机终端发送的CAN总线消息命令,根据对液力制动扭矩、机械制动扭矩、合成扭矩等参数进行检测的状态,经过电液控制算法计算,实现前驱、后驱制动控制。对正常制动回路油位、紧急制动回路油位的报警等信息,通过CAN总线反馈给驾驶员计算机终端。
2.1 联合制动单元硬件电路组成
以AT90CAN128单片机作为控制系统核心,外围设有8路光隔模拟量输入、4路模拟量输出、多路光隔开关量输入、输出、LED报警及CAN总线收发器,总线的接口芯片选用的是Philips公司的PCA82C250。具体结构见图2。
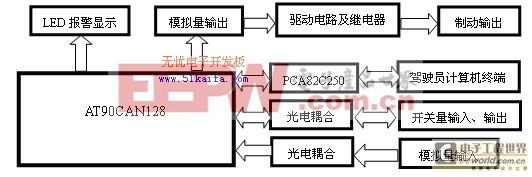
图2、制动单元硬件框图
2.2 通信协议制定
2.2.1 各终端消息标识符的定义

表1定义了驾驶员计算机终端及联合制动单元之间相互通讯的消息标识符。
表1、各终端的消息标识符
采用CAN扩展帧的29位标识符进行定义,其中P为3位优先级;R为保留扩展位;8位的BW为报文类型代码;8位的BD为目标地址或报文类型扩展码;8位的BY为发送报文源地址。部分设备节点名称和分配地址如下:主驾驶员终端地址10、副驾驶员终端地址20、联合制动单元地址30。
2.2.2 各消息类型和命令值内容的定义
驾驶员计算机终端对联合制动单元的控制消息内容为2个字节——命令类型和命令值。命令类型包括:状态查询命令(数据0x1,命令值0x0)、前/后驱制动命令(数据0x2/0x3,命令值0x0)、联合制动单元前/后驱制动信息确认(数据0x4/0x5,命令值0x0)等。
关键词: AT90CAN128 单片机 CAN总线 联合制动 通讯协议

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码