基于PID控制粉尘浓度测量仪的实现
2.2 实现电路
图4是光电转换原理图,Rf是程控的电阻调节网络,通过对Rf值的调节,改变传感器的接收灵敏度,使不同信号值均能得到有效测量。其功能实现如下:当仪器进入测量时,微处理器发出控制命令,使传感器处于接收灵敏度最高状态。读取数据后判断传感器是否处于最佳工作状态,若发现溢出或不在最佳工作状态,则改变传感器的接收灵敏度,使其进入最佳的工作状态。为了使测量数据统一,通过软件对测得的数据进行修正。
为第n次采样滤波后的输出;Xn-i为未经滤波的第n-i次采样;N为滑动平均项数。
数据采集过程如下:按测量键后,连续采样1 min(1 min采样10次),此次测量显示这一分钟内采样值的平均值,继续采样,此时显示值为此次采样值与前九次采样值的平均值,即每6 s得一个数据值,LCD可以连续显示。当切换测量挡时,延时采样0.5s。
3.2 PID控制系统
为防止调节传感器接收灵敏度时由于超调或者失调引起的振荡,使仪器读数能够平缓上升或者下降,这里采用PID算法加以调节,以对振荡进行抑制,在控制过程中采用智能判断的方法使系统处于最优状态。PID调节器具有规律简单,运行可靠,易于实现等特点。
图5是PID控制的基本原理示意图,其基本输入输出关系可表示为:
![]()
式中:μ(t)为控制器输出;e(t)为控制器输入的偏差信号;e(t)=r(t)-c(t)。
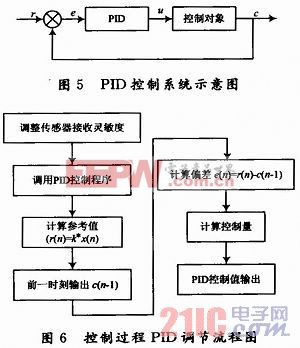
比例环节调整系统的开环比例系数,提高系统的稳态精度,降低系统的惰性,加快响应速度;积分环节可以提高系统的型别,消除或减小稳态误差,使系统的稳态性能得到改善;微分控制使得系统的响应速度变快,超调减小,振荡减轻。PID控制过程调节流程如图6所示。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码




