模糊PID控制器的设计与仿真研究
2 模糊PID控制器的控制规则设计
通常,PID控制器的控制算式为:
针对不同的偏差e和偏差变化率ec,被控过程对参数kp,ki,kd的自整定要求满足以下规律:
(1)当偏差|e|较大时,应取较大的kp和较小的kd,以加快系统的响应速度,提高系统的灵敏度;
(2)当偏差|e|中等时,应取较小的kp以及适当的ki和kd,以使系统具有较小的超调量,获取系统良好的相对稳定性:
(3)当偏差|e|较小时,应取较大的kp和ki以及适当的kd,以避免在平衡点附近出现震荡,使系统具有较好的稳定性。
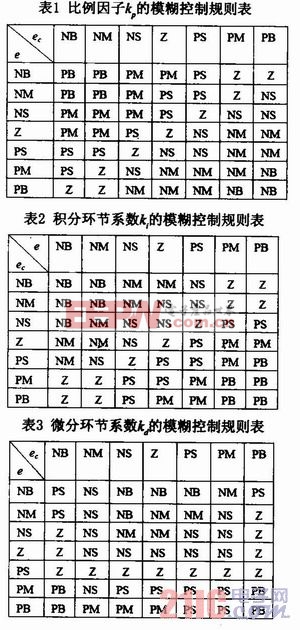
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊控制规则表,得到针对参数kp,ki,kd分别整定的模糊控制表,如表1所示。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码