一种模糊-PI双模控制系统的仿真与设计
3 模糊-PI双模控制系统的仿真
3.1 建立模糊推理系统结构
在MATLAB命令窗口键入fuzzy研命令进入模糊逻辑工具箱,在FISEditor窗口的Edit菜单下确定输入、输出变量的论域范围和各个语言变量的隶属函数形状等参数,双击每个图标就可以进行编辑,得到模糊控制器的文件。
3.2 建立模糊控制规则
用Edit菜单下的rules打开模糊规则编辑器确定“IF…THEN”形式的模糊控制规则。u共有控制规则30条,每条规则的加权值都缺省为1,推理算法为max-min合成法,解模糊方法采用取中位数法。将设计好的模糊控制器保存在一个用户自己定义的文件,后缀为fis。
3.3 创建仿真框图
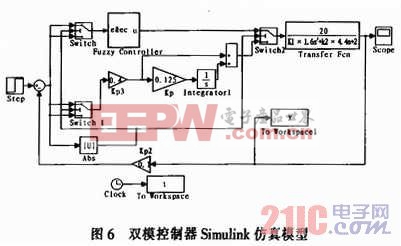
在Simulink环境下,建立模糊-PI双模控制器仿真系统结构,如图6所示,仿真结果如图7所示。

双模系统稳定且消差的关键在Kp、Ki两个参数的选择上,A的主要作用是用来改善仿真曲线前端的形态,即调节超调量和上升时间的。从仿真结果可以看出,模糊-PI双模控制系统的上升时间和最大超调量都有所减少,系统性能更好。
4 结束语
本文提出的模糊-PI双模控制器,当系统偏差较大,采用模糊控制以获得良好的动态性能;当系统偏差较小,采用PI控制以获得较好的稳态性能。通过在Matlab/Simulink环境下的仿真研究,从仿真结果可以看出,与典型PI控制器相比,模糊-PI双棋控制器能很好地解决前者上升时间长、超调量大缺点。模糊-Pl双模控制系统在快速性、稳定性及准确性方面都有较大的改善。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码