基于载流导线循迹智能车的数学模型
1.2 双水平正交电感测距、测方向



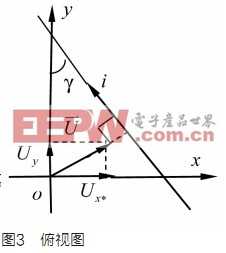
如图2所示,两电感![]() 和
和![]() 相互垂直。图3为俯视图,
相互垂直。图3为俯视图,![]() 和
和![]() 置于原点,
置于原点,![]() 和
和![]() 的轴向分别与x和y轴重合,距地面高度为
的轴向分别与x和y轴重合,距地面高度为![]() ,导线与y轴夹角为
,导线与y轴夹角为![]() 。
。![]() 和
和![]() 的相关变量分别以下标x和y表示。注意,
的相关变量分别以下标x和y表示。注意,![]() 和
和![]() 各自的电路传递函数是不相同的,下文会将其校正。
各自的电路传递函数是不相同的,下文会将其校正。
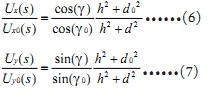
令![]() ,运用法一可得
,运用法一可得
为了消除两个电路的差异,对(6)两边同乘以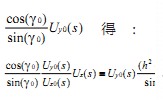 :
:
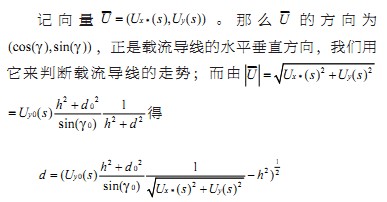
记![]() 。
。
对(7)两边同乘以![]() 得
得![]() :
:

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码