基于视觉传感器的智能车摄像头标定技术研究(下)
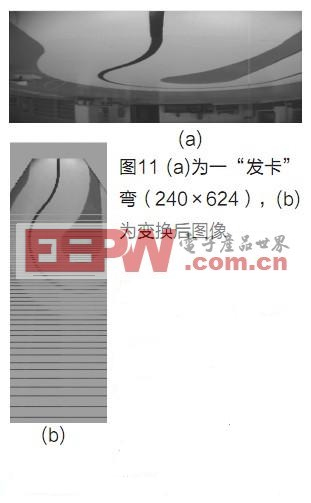
在单片机程序中,当图像预处理得到(U,V)后,可根据式5解出(Xw,Yw),差别是(U,V)处于不同位置时用不同的参数。由于相邻梯形有两个点是复用的,所以参数不会出现跳跃。图11显示该方法效果很好。
文献[7]中提到可以选取很多点,然后采用最小二乘法进行拟合。但是由于各像素点失真程度不一样(越远离图像中心失真越严重),所以最后结果可能是本来失真较小的点被失真较大的点所“拖累”,没有一个点是准确的。
情况(2):摄像头俯角较大,跑道会出现在图像各个位置(如图1(b)所示),这时单片机需要对整幅图像进行处理。可使用下列方法。
这时不再让U=Xu,V=Yu,而是设

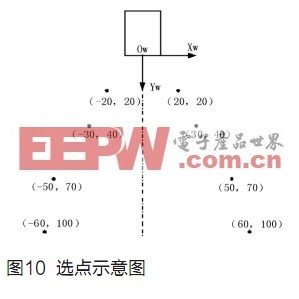
从图像中读出多个像素坐标(U,V),令k初值为0.00001,通过式7解出(Xu,Yu),根据式6通过最小二乘法解出 ,再根据式5求出(Xw,Yw),求出拟合误差sum_err。(这里要将式5与式6中的U、V分别换成Xu、Yu)。有关最小二乘法可参考文献[8]。
将k累加0.00001,同样的步骤可求出sum_err。
画出k与sum_err曲线,sum_err起初随着k增大而减小,但从某个k开始又开始增大,k值即取拐点处的值。
结论
本文根据摄像头成像模型,导出逆透视变换公式,并根据两种情况分别给出解决方案。该解决方案方便可行,可供各参赛摄像头队伍参考。
参考文献:
[1]卓晴,黄开胜,邵贝贝等. 学做智能车[M].北京:北京航空航天大学出版社,2007:17.
[2]谌彤,童周力,张文超. 国防科技大学“红旗Ⅰ”队技术报告[R].2008:53-55.
[3]杨树峰、王潇杨、李国洪. 东北大学“猎豹”队技术报告[R].2009:23-26.
[4]赵祥磊,吴颖熹,雷典. 吉林大学“爱德”队技术报告[R].2009:附录A 1-4.
[5]刘运银,刘帅,洪长志. 合肥学院“突击”队技术报告[R].2009:53-54.
[6]陈易厅,苏文友,关振明. 华南理工大学“急速”队技术报告[R].2009:22-23.
[7]胡晨晖,陆佳南,陈立刚. 上海交通大学“CyberSmart”队技术报告[R].2007:90-92.
[8]冯培悌. 系统辨识(第二版)[M].杭州: 浙江大学出版社,2004:56-58.
[9]汪国有,俞立科,张天序. 一种新的大视场景象的几何失真校正方法[J]. 数据采集与处理,1996,11(2):112-115.

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码






