基于视觉传感器的智能车摄像头标定技术研究(下)
实验方法
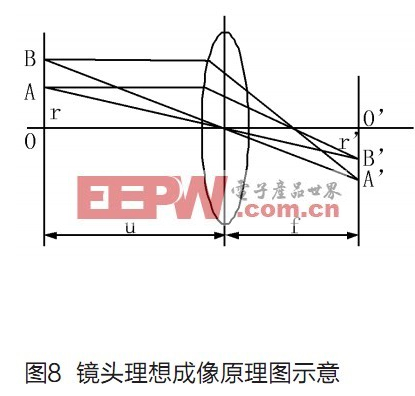
情况(1):摄像头俯角小,虽有桶形失真,但关键区域处于图像中部。如图9所示。分段逆透视变换适用于这种情况。

若忽略桶形失真,即让U=Xu+Center_u,V=Yu +Center_v(注意图7中图像原点Ouv在摄像头坐标系中坐标为(- Center_u,- Center_v,f)),则由公式1和公式2可知,
由于Zw=0,上式又可写成:
反解Xw,Yw,可得:
上式又可写成:

理论上根据4个点m1-m8就可以有一组解。
实验步骤如下:以车头为原点,在车头前选取8个点,如图10所示(单位:cm)。 选点要求范围尽量大,跑道经常出现的区域,但又不能处于摄像头输出图像边缘区域;从图9中读出各点像素坐标(a,b);根据分辨率将各像素坐标转换为单片机图像坐标,这是一个线性变换;将8个点分成near、middle、far三组,每组4个点,根据式6可求出三组解。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码






