智能车速度控制系统设计与实现
系统建模
一个针对实际对象的控制系统设计,首先要做的就是对执行器及系统进行建模,并标定系统的输入和输出。为了对车速控制系统设计合适的控制器,就要对速度系统进行定阶和归一化[2]。对此,分别设计了加速和减速模型测定实验。通过加装在车模后轮轴上的光电编码器测量电机转速。编码器齿轮与驱动轮的齿数比为33/76,编码器每输出一个脉冲对应智能车运动1.205mm。车模可以通过调节加给电机的PWM波的占空比进行调速。单片机上的PWM模块可以是8位或16位的,为了提高调速的精度,电机调速模块选用16位PWM,其占空比调节范围从0到65535,对应电机电枢电压从0%到100%的电池电压。
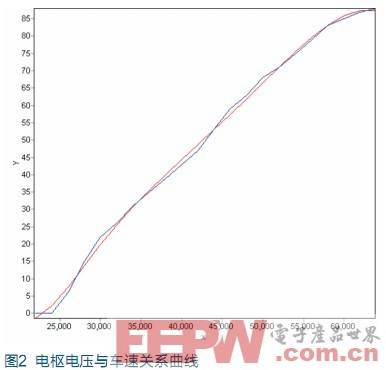
将车模放置在一段长直跑道上,采用开环方式给驱动电机加上不同的电压,记录车模在速度进入稳定后的速度值。然后将所测得的电枢电压与车速进行拟合的曲线如图2所示,由图1可将智能车加速模型近似为线性模型。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码





