基于TLE7810的车门控制系统设计
电机控制程序流程如图7所示,当采样到按钮信号或由上位机通过LIN发过来的控制指令时,MCU被唤醒,调入电机控制程序。电机控制车窗运行有两种模式――上升或下降。在每一种模式执行过程中,如果采集到由按钮发出的执行反方向运行信号时,程序控制电机立即切换到另一种运行模式。在上升模式中,有两种情况使得电机发生堵转,即玻璃上升置顶和上升过程中遭遇防夹力,这两种情况的区别判断主要是电机驱动车窗上边缘至窗顶距离d是否位于4mm处。当d≥4mm时,程序调用防夹函数,否则停止电机运转。在下降模式中,阻力主要来自车窗运行至底部的阻挡力,所以直接停止电机即可。
车窗防夹验证与结果
按照现行惯例,本项目实验为电机配备了双霍尔传感器来感应电机是否受到了阻力。并且为了完善实验条件提高实验精度,实验中使用了力传感器来设置和测定防夹力的大小。它的好处是通过与防夹力标准的对比,确保每个位置的防夹力在不同电压下都小于100N(汽车厂的标准)。

图8 车窗防夹实验测得的力和电流曲线
实验步骤总体上可分为三步:一、按动按钮使电机驱动车窗玻璃举升;二、在车窗玻璃上升过程中为其施加一个反方向力模拟防夹力;三、观察玻璃运动情况,即电机工作情况,记录相关波形。
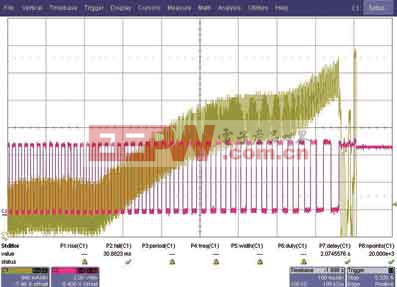
图9 电流与霍尔关系波形
整个过程中所记录的防夹力与电机电流波形如图8所示。黄线是车窗玻璃的受力情况,红线为电机电流变化曲线。车窗玻璃在上升过程中,电机电流为正,定义为正转(图中所示电流零点偏置9.9A),即车窗玻璃上升方向。在电机举升车窗过程中施加防夹力,黄线迅速向上爬升100mV。这里需要说明的是,按照传感器给出的比例关系:
防夹力(N):电压(mV)=0.3
本实验中黄线的100mV应对应30N的防夹力,ECU成功地识别出这个障碍并做出反应,由程序控制电机停转200ms,在此期间电流为零,防夹力依然作用于车窗玻璃。200ms后,程序控制电机反方向旋转驱动车窗玻璃向下运动,电流为负,待下降200mm后电机停止旋转,电流为零,整个实验过程结束。图9是突然对车窗玻璃施加防夹力这一瞬间电流和霍尔传感器信号之间的变化关系。从图中波形可以清楚的看出,在电流爬升过程中,由于电机转速下降,霍尔采集的信号周期增加,电机停转后,电流陡降,霍尔周期随之变为无穷大。
结语
通过一系列试验可以得出,在正常情况下,TLE7810的防夹力基本可以做到20N,这样就可以有80N富裕(100~20N)来应对车窗变形、或者其他不可预测障碍造成的力。防夹力度可预先设定及调整,可适应随环境因素而改变的车窗阻力以稳定防夹功能,自动校正车窗末端以确保车窗准确地开关,电机超载电流保护,渐进式电机启动及停止操控,低耗电模式、兼备手动及自动车窗控制模式,整合式设计便于安装及降低成本,备有完善断电及故障保护。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码