采用DSP工业电机控制系统电路
根据工业缝纫机的性能,提出了一套以DSP为的永磁同步电机控制系统设计方案。详述了其关键部分的功能与实现方法,设计了电路原理图,完成了系统软、硬件设计和系统的安装;并对样机系统的各项性能进行了测试。很好地实现了系统的调速范围宽、定位精度高的要求,增强了产品的市场竞争力。传统的工业缝纫机,主轴驱动大多采用离合器电机,缝制过程中的动作都靠机械和人工配合完成,存在效率低、体积大、调速范围窄、位置控制难、自动化程度低。另一方面,传统的工业缝纫机,由于主轴驱动靠离合器电机,通电后不管机器是否正处于缝制状态,电机都一直在高速运转耗电,不能实现有缝制动作时机器运转,没有缝制动作时机器停止,从而造成了大量电能浪费。
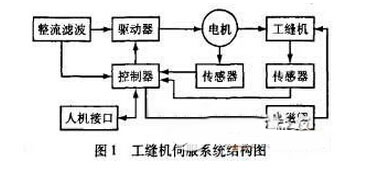
系统设计完成的是整体电控缝纫机的总体技术方案,它是完成电控缝纫机设计的关键的一个步骤,该电控系统主要包括控制器、驱动器、电机、编码器、传感器、电磁铁等几个部分,系统框图如图1所示。
控制器
图1的控制器作为工业缝纫机控制系统的,一方面产生伺服电机驱动信号,送给驱动器控制缝纫机完成定针位,并完成各种不同线迹的控制功能,另一方面产生开关信号给功率开关电路,完成缝纫机的剪线、拨线、前后加固、抬压脚等动作。控制器的动作需要电机编码器信号、机头同步信号、脚踏板加减信号、电机电流传感器信号等信号的参与运算,以协调整个机器完成相应动作。该控制器的硬件电路如图2所示。
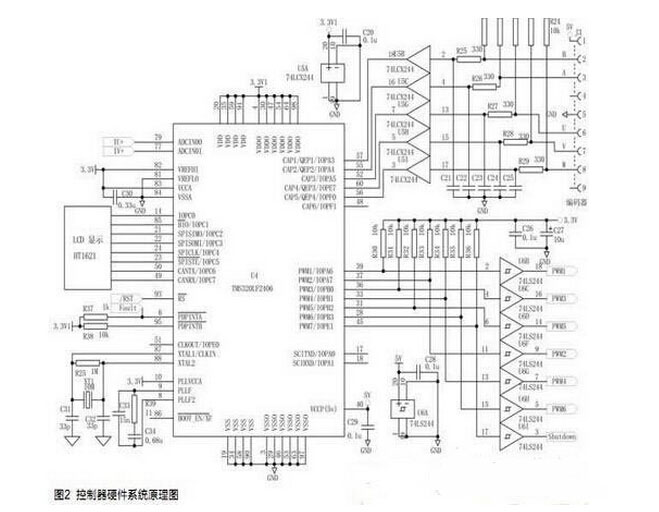
该控制器的主体采用TMS320F2406 DSP(U4)进行程序编程,以实现对永磁同步电机实行磁场定向控制。对永磁同步电机实行磁场定向控制的原理框图如图3。
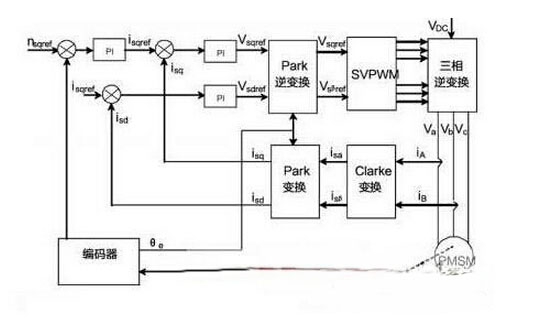
通过电流传感器测量逆变器输出的定子电流iA、iB,经过DSP的A/D转换器转换成数字量,并利用iC=-(iA+ iB)计算出iC。通过Clarde变换将电流iA、iB、iC变换成旋转坐标系中的直流分量isq、isd,isq、isd作为电流环的负反馈量。利用增量式编码器测量电动机的机械转角位移qm,并将其转换成电角度qe和转速n。电角度qe用于参与Park变换和逆变换的计算。转速n作为速度环的负反馈量。给定转速nref与转速反馈量n的偏差经过速度PI调节器,其输出作为用于转矩控制的电流q轴参考分量isqref。isqref和 isdref(等于零)与电流反馈量isq、isd的偏差经过电流PI调节器,分别输出dq旋转坐标系的相电压分量Vsqref和Vsdref。 Vsqref和Vsdref再通过park逆变换转换成a b直角坐标系的定子相电压矢量的分量Vsaref和Vsbref。当定子相电压矢量的分量Vsaref、Vsbref和其所在的扇区数已知时,就可以利用电压空间矢量SVPWM技术,产生PMW控制信号来控制逆变器。
驱动器
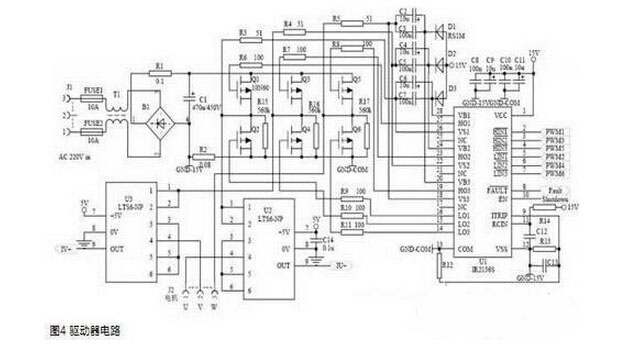
驱动器是系统的功率变换部分,是驱动电机运转的关键部分,该部份包括整流、逆变、前置驱动、SVPWM驱动输出、电流检测及多种保护功能。硬件电路如图4所示。电流环的运算需要DSP对电机相电流的检测 ,该系统设计只需要采集两相的电流(图3中iA,iB),根据电流定理就可以知道第三相的电流了。本系统所采用电流传感器为LEM(莱姆)公司的LTS6-NP,如图4中U2,U3,其为霍尔型电流传感器。图4中的IR2136(U1)是IR公司的高压IGBT驱动器,它接受来自DSP的6路PWM信号,处理后驱动图4中6只IGBT(Q1-Q6),产生SVPWM信号,控制永磁同步电机的运转,以达到理想的伺服控制性能。
编码器
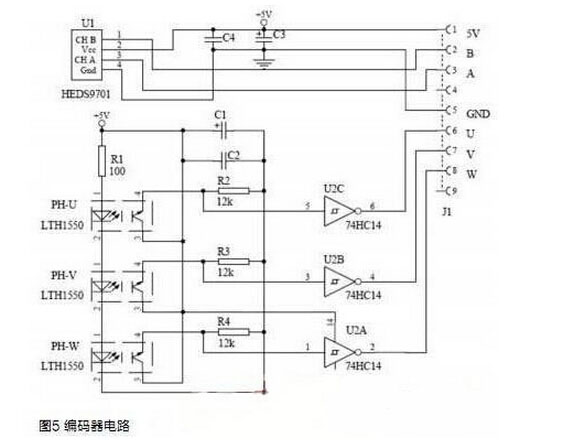
永磁同步电机控制离不开编码器,DSP只有通过对编码器A、B信号及U、V、W信号的检测计算,才能完成电机仍至整个系统的控制。另一方面,我们只有自己设计并制作编码器,才可将价格降到限度。图5为编码器硬件图,U1(HEDS9701)采集A、B信号,PH-U、PH-V、PH-W三只光电开关检测产生U、V、W信号,它们与码盘一起装在电机内,检测电机转速、判断转子位置,并将采集信号送给DSP。DSP(TMS320F2406)内部带有正交编码模块,从编码器输出的正交信号输入DSP的PHASEA引脚和PHASEB引脚,内部的正交编码模块将信号进行四倍频,再由位置计数器计数从而可以确定转子的速度和位置。
PHASEA和PHASEB的输入信号首先必须通过一个干扰信号滤波器,该滤波器可以数字延时,可以滤除毛刺,保证只有真正的信号才进行计数。同时对于只用单个信号的控制,均可配置为单个的脉冲计数。对于一个高速转轴编码器,转轴速度可以通过计算每单位时间内位置计数器的变化值来得到。对于电机低速时,由于输入PHASEA和 PHASEB与通用定时器相连均可作为输入捕捉引脚,可以利用定时器测量正交相位之间的时间周期来得到高分辨率的速度测量。定时器模块利用一个16位的计数器,通过对总线时钟的分频来计数。对于一个1000齿的编码器来说,通过利用定时器测量速度可以测量到0.15转每分。
机头同步定位器
编码器是装在电机里,而机头同步定位器则是装在机头里,它们均属于传感器的范畴。微机控制缝纫机的一个重要指标是停机位置的准确度,这里包括上针位和下针位的停机,所以,缝纫机在这两个位置必须各给出一个信号,DSP才可以通过检测这两个信号来控制电机停止,这是机头同步定位器的主要作用。另外电机运转通过皮带与机头连接传动,皮带可能存在打滑现象,只有结合电机编码器信号与机头同步信号,才能准确判断系统状态,从而保证系统运转在状态。上下针位信号的产生主要是依靠安装在机头上的两块极性相反的磁铁(跟着电机旋转),对两个相反安装的开关型霍尔传感器(固定)作用,即每块磁铁仅对应一个传感器起作用。当机头旋转到上针位或下针位位置上时,相应的开关霍尔传感器因为磁场到达其跳变的阈值,而产生输出跳变,也就是需要的开关信号,即机头同步信号。我们选用Allegro公司的U3144,应用方便,性能稳定。
目前该缝纫机控制系统已开发成功,并进行了小批量生产。从实际使用效果看,该控制技术实现了缝纫机针位控制的快速性与准确性,保证了高低速运行的平稳性,同时使缝纫机具备了自动剪线、自动拨线、自动前后加固的功能。基于DSP的磁场定向控制技术是运用于缝纫机电气控制系统的突破口,它的成功开发,其意义不仅在于可以在工业缝纫机电控系统中获得较高的性能,另外可将该技术演化到其他种类的缝制纺织设备中去,以实现针位控制的快速性与准确性。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码






