智能汽车控制系统硬件电路设计
智能车又称为无人驾驶汽车,属于轮式移动机器人的一种,是一个集环境感知、路径规划、自动驾驶等多功能于一体的综合系统。智能汽车技术将许多领域联系在一起,如计算机科学、人工智能、图像处理、模式识别和控制理论等。智能汽车与一般所说的自动驾驶有所不同,它更多指的是利用GPS 和智能公路技术实现的汽车自动驾驶。这种汽车不需要人去驾驶,因为它装有相当于人的“眼睛”、“大脑”和“脚”的电视摄像机、电子计算机和自动操纵系统之类的装置,这些置都装有非常复杂的电脑程序,所以这种汽车能和人一样会“思考”、“判断”、“行走”,可以自动启动、加速、刹车,可以自动绕过地面障碍物在复杂多变的情况下,能随机应变,自动选择最佳方案,指挥汽车正常、顺利地行驶。
电路系统是智能汽车硬件系统的核心,对于本硬件电路系统而言,稳定性是需要优先保证的性能指标,毕竟跑完全程才是取得成绩的前提。在此基础上,还应当综合考虑智能汽车的动力性、重心及电路板的紧凑性等其他指标。
电机驱动模块
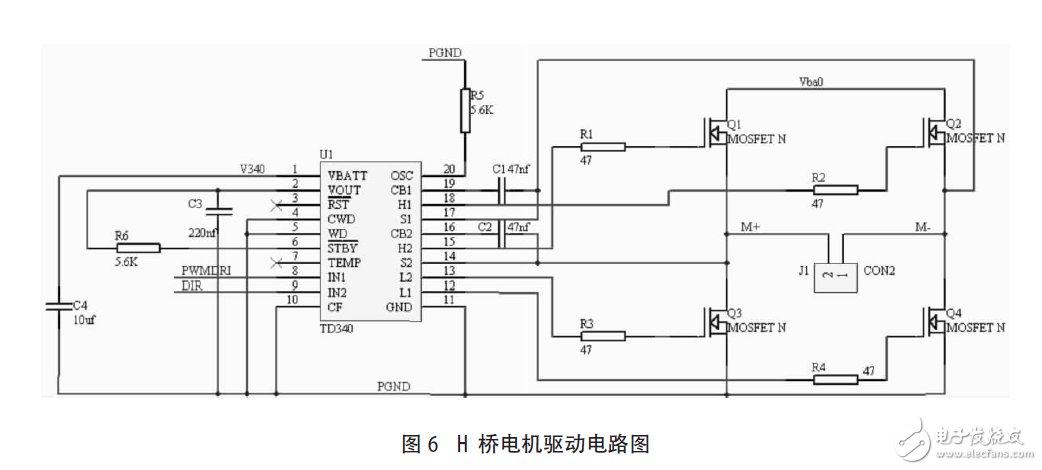
电机驱动模块为智能汽车的行驶提供动力,它的性能直接影响到后轮电机的控制性能,包括加速、减速与制动等性能。本文采用MOSFET 驱动芯片加全桥驱动方案,只需合理的选择MOSFET驱动芯片和功率MOSFET 以保证性能即可。电路图如图6 所示。
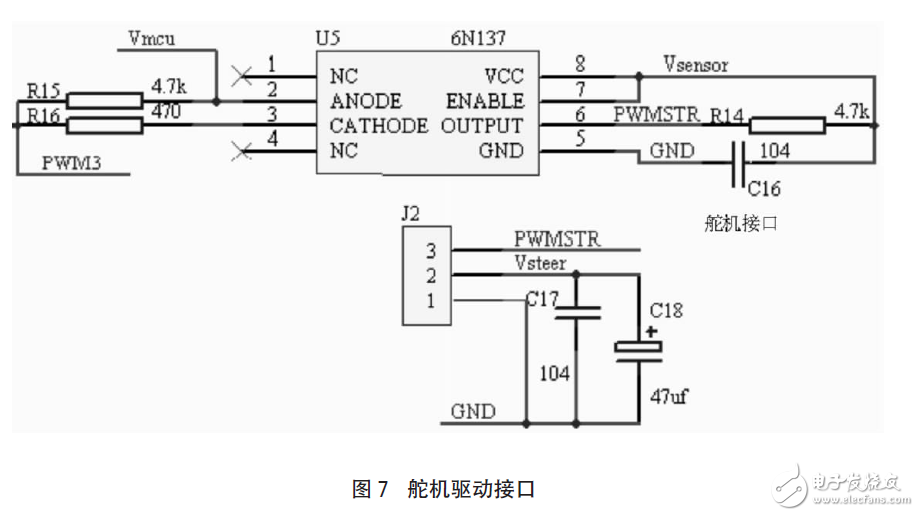
舵机驱动模块
舵机负责智能汽车的转向,舵机模块能否稳定工作直接影响到智能汽车在赛道上高速行驶时的稳定性以及转向时的灵敏度和精确度。舵机工作原理为:舵盘角位由单片机发出的PWM 控制信号的脉宽决定,舵机内部电路通过反馈控制调节舵盘角位。由于自身即为角度闭环控制,而且性能较好,故系统中就不必考虑外加舵机闭环。舵机驱动模块电路如图7 所示。舵机驱动模块同样属于功率部分,用6N137 光耦进行信号隔离。
智能车辆是一个涉及多领域的复杂的综合系统,要达到实用的目的,还要进一步深入下研究去,还有许多工作要做。在硬件上还需要解决因摄像头自身精度的差异或其因外部因素丢失数据导致影响智能车正常运行的问题,增强抗干扰能力;在软件上,还需要进一步优化算法,控制系统是智能汽车的核心内容,针对智能汽车的功能需求,对智能汽车控制系统关键模块进行了研究,设计的各模块被应用于“飞思卡尔”智能汽车中,文中各图对智能汽车的研究具有启发作用。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码