运用于电池管理系统中的串口与CAN通信模块电路设计
作者:dolphin
时间:2017-04-06
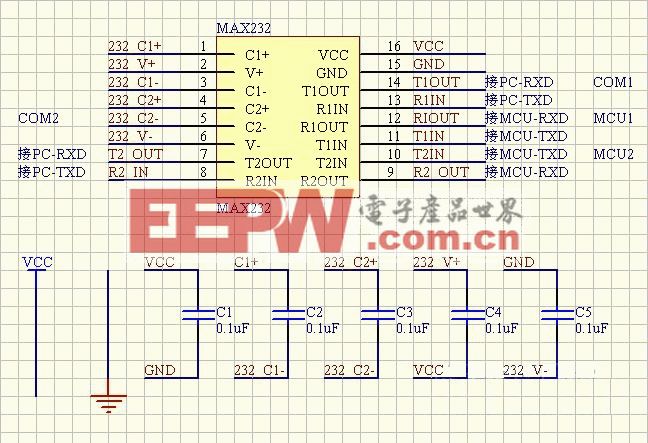
串口通信模块:电池管理系统将采集处理后的数据通过串口发送到PC机界面上,实现人机交互。通过串口界面,可以观察到电池的总电压、单体电压、电流、SOC、故障状态、充放电功率等参数,还可以通过串口发送实现管理系统的在线标定。其硬件电路主要基于MAX232芯片,如图)所示。
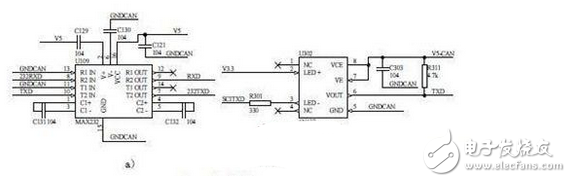
MAX232 是+5V电源的收发器,与计算机串口连接,实现RS-232接口信号和TTL 信号的电平转换,使BMS 和PC 机能够进行异步串行通讯。为了防止电磁干扰影响串口上数据的传输,必须对总线信号进行隔离。串口是单向传输,所以利用6N137光电耦合较为方便)所示为232TXD 信号光耦隔离电路。
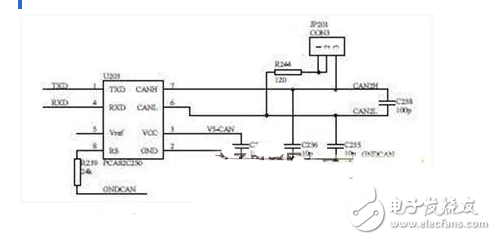
CAN通信模块:CAN通信是架接电池管理系统(BMS)与整车HCU 之间的信息桥梁,BMS将电池的状态参数通过CAN总线发给HCU,HCU 通过判断当前的电池状态来做出决策,分配电机和发动机之间的功率,控制电池的充放电。同时BMS还可以接收HCU 发来的相关命令,做出相应的处理。其硬件方面主要是通过PCA82C250通用CAN收发器来提供对总线数据的差动发送能力和对通信总线数据的差动接收能 力。通过类似于图)的光耦隔离电路来加强CAN 总线上的抗干扰能力。其硬件电路由图所示。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码