无人机在白宫坠毁!难道是没用时间测量芯片?
无人机系统主要由飞控子系统、舵机云台及视频子系统、以及地面遥控子系统组成。飞控子系统又称为飞行管理与控制系统,相当于无人机系统的“心脏”部分,对无人机的稳定性、数据传输的可靠性、精确度、实时性等都有重要影响,对无人机飞行性能起着决定性的作用。舵机云台及视频子系统主要用于对相机(可以用于航拍、地理测绘等多种用途)的控制(包括360度旋转方位控制及俯视角度控制)、图像数据的传输等。而地面遥控器主要用于向飞控系统发送控制指令、接收无人机的飞行状态信息及接收图像数据。
几个月前,一架无人机坠毁在美国总统居住地白宫的草坪上,引起了人们对于无人机安全操作的广泛关注。无人机想要继续发展,除了续航、功能进步之外,安全性也是不可小觑的方面。无人机在飞行过程中能否自动识别到飞行轨迹上的障碍物(固定、移动或突然出现),并且能及时的躲避,改变和调整飞行轨迹,这个是影响无人机安全运行的重要方面。这样的系统被称为自动避障系统”(Obstacle Avoidance),属于飞控子系统的重要组成部分之一。
目前主流的无人机避障系统主要有三种,超声波雷达、TOF测距、以及相对更复杂的、由多种测距方法和视觉图像处理组成的复合型避障系统。
超声波测距
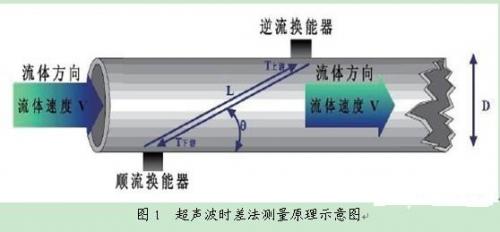
超声波测距的原理是利用超声波在空气中的传播速度为已知,超声波发射器向某一方向发射超声波,在发射的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(S),即:S=340t/2 。这就是时间差测距法。超声波测距原理与雷达原理是一样的。
无人机上飞控系统即可。加装定向的超声波发射和接收器,由于超声波易于定向发射、方向性好、强度易控制、与被测量物体不需要直接接触的优点。
TOF测距
TOF是飞行时间(Time of Flight)技术的缩写,飞行时间 – 这是一个光脉冲前往目标并返回的时间。即传感器发出经调制的近红外光,遇物体后反射,传感器通过计算光线发射和反射时间差或相位差,来换算被拍摄景物的距离 。
对于小距离测距(<10m),通常使用三角测量法。 使用这种方法实现的精度在微米级范围内,但测量的距离很有限。对于100米左右的距离,人经常使用的相移测量技术。 通过激光调制,传出和传入的光之间的相移给计算出距离。 为了达到毫米范围内的分辨率,对采样率的要求非常高。使用时间数字转换器,人们有了捷径来数字化飞行时间。 它使直接测量光的飞行时间成为可能。 原理很简单,但是细节是难点!总所周知,光的飞行速度很快。
C=299792458
C:=光速
因此, 必须能够处理极短的时间。 在仅仅 1 微秒的时间里, 光线就可以穿过 300 米! 高分辨率意味着在时间测量中的最高精度。一般情况下,光线能够通过一个物体和镜子反射回来,所有光线通过两倍
的实际距离。所以我们得出:
D=C/2*TOF
这个范围非常适合使用ACAM公司的TDC-GP22。 单个芯片TDC 有一个单一的分辨率 90ps ,它相当于13.5mm 距离。通过平均可以提高分辨率到<10ps or<1.5mm。TDC-GP22 是一个非常通用的集成电路,它可以在不同的模式下被使用。具体哪个模式被选择,我们看一下具体的说明:
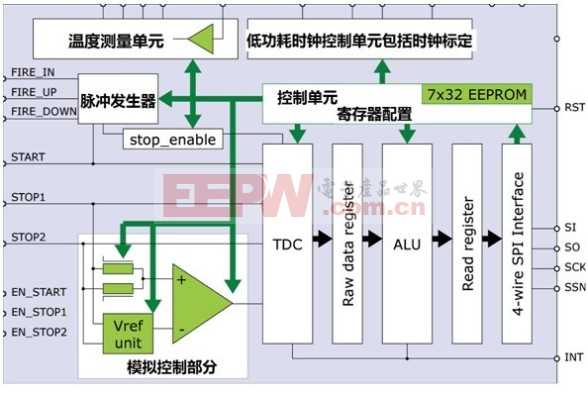
TDC-GP22内部框图及典型应用,如图1

图1:TDC-GP22内部框图及典型应用
TDC-GP22 测量范围从0到300m
• 测量范围从 3.5 ns 到 2. 0 μs (0到2.0μs在不同的Stop通道之间)
• Typ.90ps分辨率rms (13.5 mm)
• 可以通过平均来达到更好的分辨率
• 直到每秒500,000 次测量
• 20 ns 最小脉冲间隔, 最多接受 4个脉冲
• 对于每一个通道的四次采样能力
• 对于每个通道可选择上升 和/或下降沿触发
• 窗口功能的使能引脚
TDC-GP22无人机避障系统应用框图,如图2:
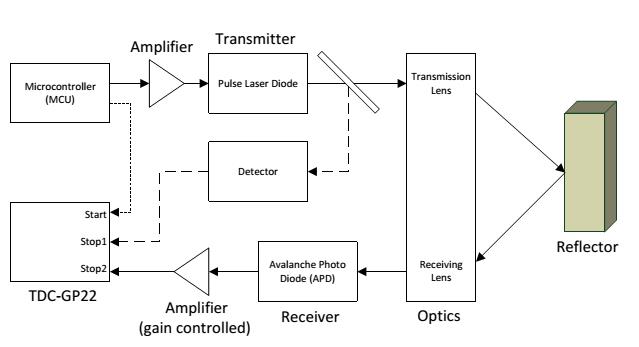
图2:TDC-GP22无人机避障系统应用框图
TDC-GP22 从微处理器得到一个假测量的开始。光学参考触发Stop1, 反射光束触发Stop2。通过TDC-GP22内部高速DSP进行计算,得到无人机与障碍物之间的实时距离,将数据传输给飞控主控器,做为系统控制参数之一,调整飞行的速度和方向,保证无人机的安全、可靠飞行。无论是针对TDC-GP22这颗器件还是针对无人机这一领域,世强都有非常成熟的技术支持能力。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码