智能汽车CCD摄像头车分段PID控制算法设计方案
自动寻迹智能车涉及到当前高技术领域内的许多先进技术,其中最主要的是传感技术、路径规划和运动控制。本课题是以飞思卡尔智能车竞赛为背景,以单片机作为核心控制单元,以摄像头作为路径识别传感器,以直流电机作为小车的驱动装置,以舵机控制小车转向。车模竞赛的赛道是一个具有特定几何尺寸约束、摩擦系数及光学特性的KT板,其中心贴有对可见光及不可见光均有较强吸收特性的黑色条带作为引导线,宽度为2.5 cm。在行驶过程中,系统通过摄像头获取前方赛道的图像数据,同时通过测速传感器实时获取智能车的速度,采用路径搜索算法进行寻线判断和速度分析,然后作控制决策,控制转向舵机和直流驱动电机工作。智能车通过实时对自身运动速度及方向等进行调整来“沿”赛道快速行驶。本文主要介绍摄像头通过提取赛道黑线信息交予单片机处理,通过单片机输出控制信号控制舵机转向来控制车模的转向,从而很好的自动循迹。
1 总体软硬件结构及思路
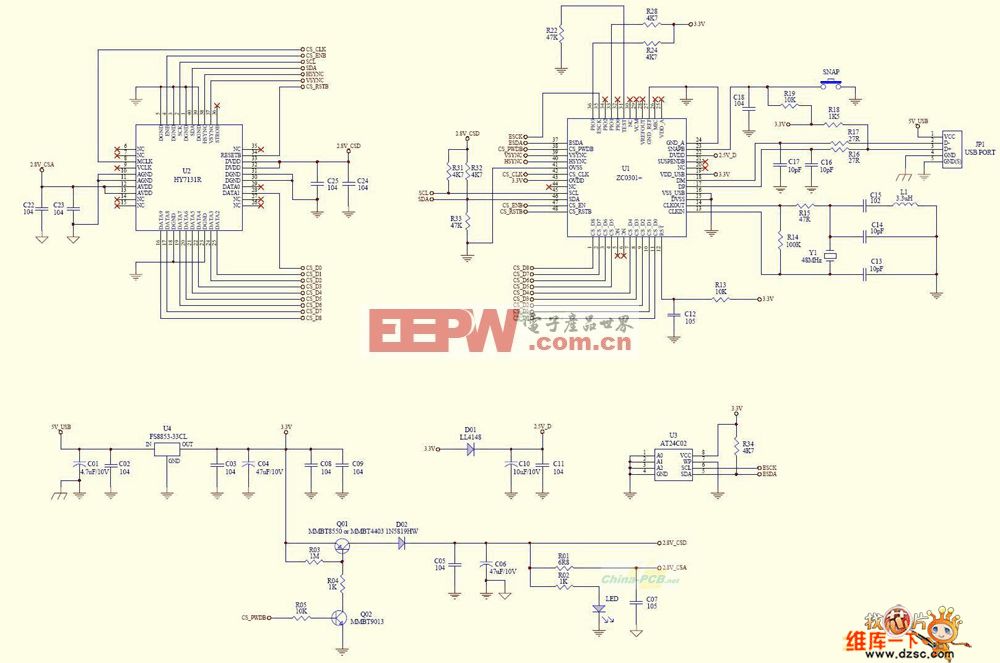
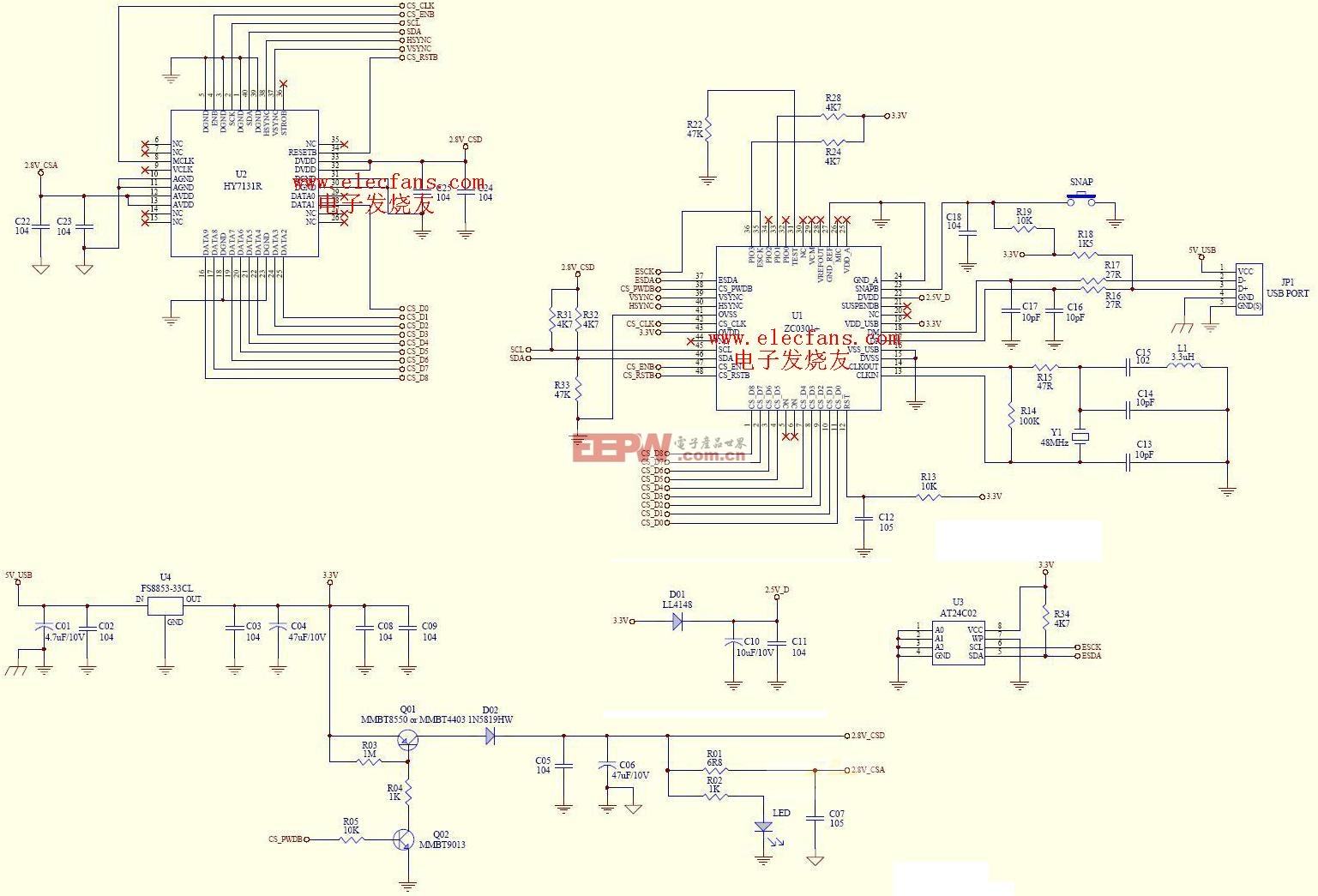
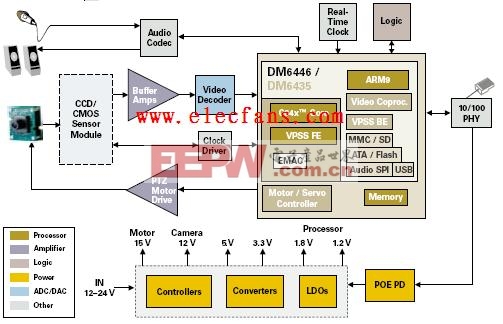
此智能车辆定位系统用摄像头拍摄车辆前方的赛道,通过MC9S12XS128采样视频信号,获得图像数据。然后用合适的算法,如跟踪边缘检测算法,分析图像数据,提取目标指引线。然后,系统根据目标指引线的位置信息,对舵机和电机施以合适的控制。本智能车运动系统的结构图如图1所示。

因为系统是一个有机的整体,所以需配合好系统的摄像头、控制单片机、电机(包括直流伺服电动机、光电编码器)、舵机和辅助电路(电源板、电机驱动板)等各个部分。舵机是实时控制车模的转向,是比赛快速性和稳定性的关键,舵机控制有很多的控制算法,如:PID经典控制算法、模糊算法、人工智能算法等。
2 系统程序总体控制流程
系统的基本软件流程是:首先,对各功能模块和控制参数进行初始化;然后,通过图像采集模块获取前方赛道的图像数据,同时通过速度传感器模块获取赛车的速度。采用PID对舵机进行反馈控制。另外根据检测到的速度,结合速度控制策略,对赛车速度不断进行适当调整,使赛车在符合比赛规则的前提下,沿赛道快速行驶。系统的基本软件结构流程图,如图2所示。
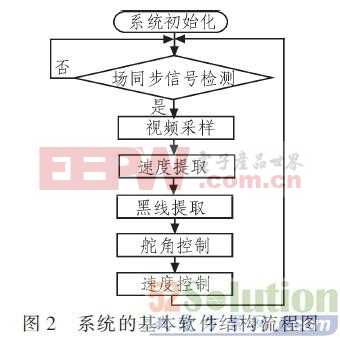
系统的软件要求控制的准确性、稳定性。采样提取黑线是控制输入量的基础,要求采样的精确稳定。输入量给舵机以后又要求舵机输出的快速相应性、稳定性和准确性。经过多次实验及近一个学期的调车经验,选用了并改进了经典的PID控制器对车模的舵机进行控制调节。
3 图像识别
用CCD摄像头采集车模前方一定距离内的黑线,从中提取相关量,用来控制舵机的转向,实现智能车的自动循迹。由于单片机数据处理能力和速度有限,不能在短短的20 ms时间内处理整场图像。本系统设置摄像头前瞻为1.2 m。在不影响道路检测精度需要的前提下,本系统采用隔行采集来压缩图像数据,即相隔不同的有效行采集一行数据(近处相隔的少,远处相隔的多),一共可采集 44行数据。此外为了进一步提高A/D转换的速度,本系统还适当地将XS12的CPU超频运行并且设置A/D转换器的精度为8位,这样每行能采样到67个点,形成了一个面阵,而黑线在其中占据了某些点位。由于我们一行采集67个点,故中间值为33。图像是智能车的底层,图像的采集正确与否在以后的控制中尤为重要,故一定要确保采集回来的黑线的真实有效性,并且要增加滤波算法,比如在有效前瞻很小的时候,本来只要判断出黑线的转向即可,给舵机以极限转角可以让车急转弯。但是有效行很少的时候,如果不用特殊的滤波方法,只要有一行的黑线提错,就可能让小车转错,至于转出界。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码